Fahrverhaltensparameter Fahrstreifenwechsel bearbeiten
1. Wählen Sie im Menü Basisdaten > Fahrverhalten.
Die Liste Fahrverhalten öffnet sich. Einige Fahrverhaltensparametersätze können vordefiniert sein.
Sie können die Liste standardmäßig bearbeiten (Listen verwenden).
Sie können alle Fahrverhaltensparameter in der Liste ändern oder mit folgenden Schritten in Registern.

|
Hinweise:
|

2. Klicken Sie mit der rechten Maustaste auf den gewünschten Eintrag.
3. Wählen Sie im Kontextmenü den Eintrag Bearbeiten.
Das Fenster Fahrverhalten öffnet sich.
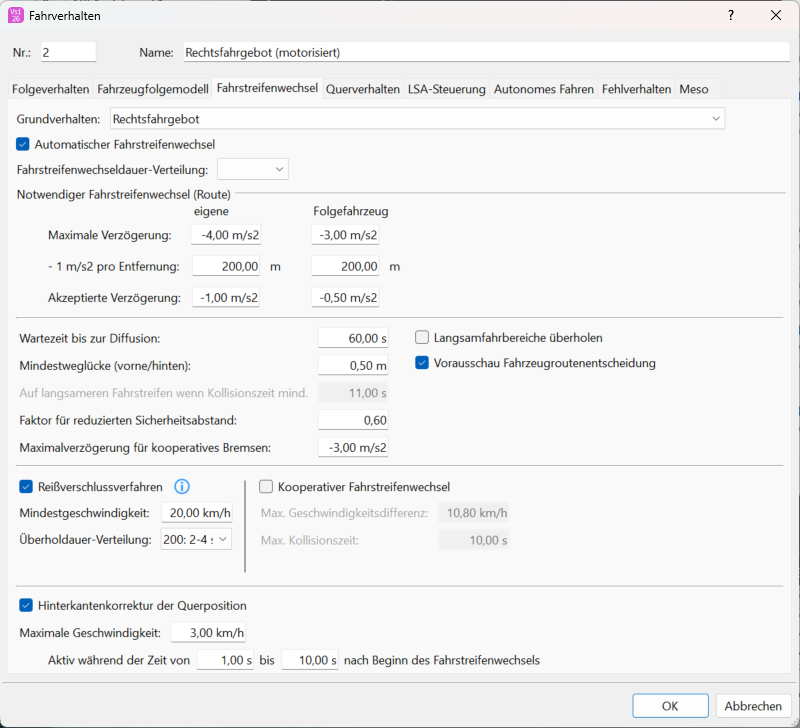
4. Wählen Sie das Register Fahrstreifenwechsel.
Daten bereits definierter Fahrverhalten können Sie in der Liste Fahrverhalten bearbeiten oder über das Menü Basisdaten > Fahrverhalten.
5. Nehmen Sie die gewünschten Einstellungen vor:
| Element | Beschreibung |
|---|---|
|
Grundverhalten |
Fahrstreifenwechselverhalten (FsWechsVerh):
Sie können unabhängig von der gewählten Option das Grundverhalten durch die Einstellungen unter Kooperativer Fahrstreifenwechsel realistischer modellieren. |
|
Automatischer Fahrstreifenwechsel |
Nur aktiv, wenn das Grundverhalten Rechtsfahrgebot, Linksfahrgebot und auf dem Register Fahrzeugfolgemodell das Fahrzeugfolgemodell Adaptive Cruise Control (ACC) ausgewählt ist (Fahrverhaltensparameter Fahrzeugfolgemodell bearbeiten). |
|
Fahrstreifenwechseldauer-Verteilung |
Zeitverteilung für die Dauer, die Fahrzeuge benötigen, um einen Fahrstreifenwechsel durchzuführen (Zeitverteilungen verwenden) |
|
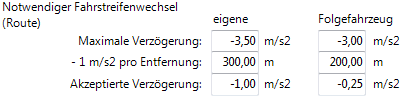
Notwendiger Fahrstreifenwechsel (Route) |
Spalten eigene und Folgefahrzeug: Vom Fahrer akzeptierte Verzögerung für Fahrstreifenwechsel aufgrund der vorgegebenen Routen für das eigene überholende Fahrzeug sowie für das Folgefahrzeug:
|
 Ist die Option ausgewählt, wirkt das Entscheidungsmodell für den Fahrstreifenwechsel autonomer Fahrzeuge, die den Fahrstreifen freiwillig wechseln möchten. Dabei darf nicht das
Ist die Option ausgewählt, wirkt das Entscheidungsmodell für den Fahrstreifenwechsel autonomer Fahrzeuge, die den Fahrstreifen freiwillig wechseln möchten. Dabei darf nicht das Beispielsweise ergeben die folgenden Parameter den unten dargestellten Kurvenverlauf:
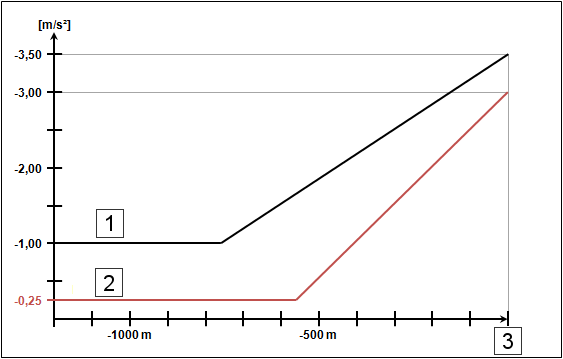
Legende:
1 schwarze Linie: Fahrstreifenwechsler (eigene)
2 rote Linie: Folgefahrzeug
3: Nothaltposition
| Element | Beschreibung |
|---|---|
|
Wartezeit bis zur Diffusion |
DiffZeit: Maximale Zeit, welche ein Fahrzeug an der Nothaltposition auf die Möglichkeit zum notwendigen Fahrstreifenwechsel warten darf. Nach Erreichen dieser Zeit wird das Fahrzeug aus dem Vissim-Netz entfernt, gleichzeitig wird eine Warnung in die Datei *.err und in das Fenster Meldungen eingetragen. |
|
Mindestweglücke(vorne/hinten) |
(MinWegl): Mindestabstand, der nach einem Fahrstreifenwechsel zwischen zwei Fahrzeugen vorhanden sein muss, damit dieser erfolgen kann, Standardwert 0.5 m. Für einen Fahrstreifenwechsel bei fließendem Verkehr kann der geschwindigkeitsabhängige Sicherheitsabstand einen größeren Mindestabstand zwischen den Fahrzeugen erfordern. |
|
Auf langsameren Fahrstreifen wenn Kollisionszeit mind. |
Freifahrzeit (FrFahrz): nur bei Rechtsfahrgebot oder Linksfahrgebot: definiert den Mindestabstand in Sekunden, der zu einem Vordermann auf dem langsameren Fahrstreifen vorhanden sein muss, damit ein überholendes Fahrzeug auf den langsameren Fahrstreifen wechselt. |
|
Faktor für reduzierten Sicherheitsabstand |
Der Sicherheitsabstandsfaktor (Fahrstreifenwechsel) (SichAbstFsWechs) wird für jeden Fahrstreifenwechsel berücksichtigt. Er betrifft folgende Parameter:
Während des Fahrstreifenwechsels reduziert Vissim den Sicherheitsabstand auf den Wert, den die folgende Multiplikation ergibt: Ursprünglicher Sicherheitsabstand xFaktor für reduzierten Sicherheitsabstand Mit dem Standardwert 0.6 vermindert sich damit der Sicherheitsabstand um 40 %. Sobald ein Fahrstreifenwechsel abgeschlossen ist, wird wieder der ursprüngliche Sicherheitsabstand berücksichtigt. |
|
Fahrstreifenwechsel-Geschwindigkeitsdifferenz |
FsWechsGeschwDiff: Ein Fahrzeug möchte einen Fahrstreifenwechsel durchführen, wenn die eigene Wunschgeschwindigkeit um den aus dieser Geschwindigkeitsverteilung gezogenen Wert größer ist als die jeweils relevante Geschwindigkeit. Diese kann sein:
|
|
Maximalverzögerung für kooperatives Bremsen |
Maximale kooperative Verzögerung (KoopVerz): Gibt an, wie stark das Folgefahrzeug A kooperativ bremst, um einem vorausfahrenden Fahrzeug B den Fahrstreifenwechsel in den eigenen Fahrstreifen zu ermöglichen, Standardwert -3 m/s2. Dabei gilt:
Beim kooperativen Bremsen bremst ein Fahrzeug mit folgenden Werten:
|
|
Langsamfahrbereiche überholen |
LaFahrBerÜbh: Die Option ist standardmäßig nicht ausgewählt.
|
|
Vorausschau Fahrzeug-Routenentscheidung |
VorausFzRoutEnt: |
|
Kooperativer Fahrstreifenwechsel |
KoopFsWechsel: Wenn ein Fahrzeug A bemerkt, dass ein vorausfahrendes Fahrzeug B vom benachbarten Fahrstreifen auf seinen Fahrstreifen A wechseln möchte, wird Fahrzeug A versuchen, auf den nächsten Fahrstreifen zu wechseln, um Fahrzeug B den Fahrstreifenwechsel zu erleichtern. Beispielsweise würde Fahrzeug A vom rechten auf den linken Fahrstreifen wechseln, wenn Fahrzeug B von einem Einfädelfahrstreifen nach links auf den rechten Fahrstreifen wechseln möchte.
Fahrzeug A verhält sich bei diesem Fahrstreifenwechsel so, als ob es aufgrund einer Verbindungsstrecke in großer Entfernung den Fahrstreifen wechseln müsste. Es akzeptiert dabei die eigene maximale Verzögerung und die des Folgefahrzeugs C auf dem neuen Fahrstreifen entsprechend der Parameter für notwendige Fahrstreifenwechsel. Fahrzeug A vollzieht keinen kooperativen Fahrstreifenwechsel, wenn folgende Bedingungen erfüllt sind:
|
|
Reißverschlussverfahren |
|
|
Hinterkantenkorrektur der Querposition |
HKantKorr: Wenn ein Fahrstreifenwechsel mit einer geringeren Geschwindigkeit erfolgt, als im Feld Maximale Geschwindigkeit eingegeben ist, bewegt sich die Hinterkante eines Fahrzeugs seitwärts. Die Hinterkantenkorrektur gleicht diese Bewegung aus. Damit steht am Ende des Fahrstreifenwechsels das Fahrzeug parallel zur Fahrstreifenmitte und nicht schräg auf dem ursprünglichem Fahrstreifen. Die Hinterkantenkorrektur wird vollständig durchgeführt, auch wenn das Fahrzeug zum Stillstand kommt. Die Hinterkantenkorrektur wirkt sich auf die Kapazität aus. Die Hinterkantenkorrektur wird nur berücksichtigt, wenn im Fahrverhaltensparameter Querverhalten die Option Nachbarfahrstreifen beachten aktiviert ist (Fahrverhaltensparameter Querverhalten bearbeiten).
Die Attribute aktiv während der Zeit von und bis bestimmen auch die Geschwindigkeit der Hinterkantenkorrektur. |

 Ist die Option nicht ausgewählt, starten Fahrzeuge nie einen freien Fahrstreifenwechsel direkt stromaufwärts eines Langsamfahrbereichs. Außerdem ignorieren sie die Langsamfahrbereiche auf dem neuen Fahrstreifen vollständig.
Ist die Option nicht ausgewählt, starten Fahrzeuge nie einen freien Fahrstreifenwechsel direkt stromaufwärts eines Langsamfahrbereichs. Außerdem ignorieren sie die Langsamfahrbereiche auf dem neuen Fahrstreifen vollständig.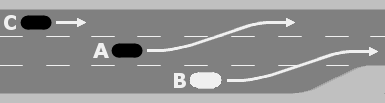
Einfädeln von Fahrzeugen beim Fahrstreifenwechsel
Fahrzeuge wechseln den Fahrstreifen für einen Fahrstreifenwechsel, um die nächste Verbindungsstrecke ihrer Route zu erreichen. Wenn Fahrzeug A den Fahrstreifen wechseln muss und erkennt, dass der Nachbarvordermann B auf dem Zielfahrstreifen etwa die gleiche Geschwindigkeit hat oder nur geringfügig schneller ist (-1.0 m/s < dv < 0.1 m/s), bremst A leicht (mit 0.5 m/s²), um in die Lücke hinter B wechseln zu können:

Wenn Fahrzeug A mit Vordermann C erkennt, dass ein Nachbarvordermann B auf den Fahrstreifen von A wechseln möchte, kann A auch dann kooperativ Bremsen, wenn B stromabwärts von C ist:

Wenn Nachbarvordermann B, den Fahrzeug A eigentlich einfädeln lassen wollte, sich inzwischen schon stromabwärts vom Vordermann C von A auf dem eigenen Fahrstreifen befindet, vergisst A, dass B das Einfädeln ermöglicht werden sollte. Damit kann A wieder sofort auch andere Fahrzeuge auf den eigenen Fahrstreifen wechseln lassen.
Übergeordnetes Thema:
Fahrverhaltensparametersätze definieren
Fahrverhaltensparameter Folgeverhalten bearbeiten
Entscheidungsmodelle für Fahrstreifenwechsel
Zugehörige Themen:
Fahrzustände im Verkehrsflussmodell nach Wiedemann
Wiedemann 74-Modellparameter definieren
Wiedemann 99-Modellparameter definieren
Fahrverhaltensparameter Fahrzeugfolgemodell bearbeiten
Fahrverhaltensparameter LSA-Steuerung bearbeiten
Fahrverhaltensparameter Autonomes Fahren bearbeiten
Eigenschaften des Platoons und der Fahrzeuge im Platoon
Fahrverhaltensparameter Fehlverhalten bearbeiten
