Fahrverhaltensparameter Fahrzeugfolgemodell bearbeiten
1. Wählen Sie im Menü Basisdaten > Fahrverhalten.
Die Liste Fahrverhalten öffnet sich. Einige Fahrverhaltensparametersätze können vordefiniert sein.
Sie können die Liste standardmäßig bearbeiten (Listen verwenden).
Sie können alle Fahrverhaltensparameter in der Liste ändern oder mit folgenden Schritten in Registern.

|
Hinweise:
|

2. Klicken Sie mit der rechten Maustaste auf den gewünschten Eintrag.
3. Wählen Sie im Kontextmenü den Eintrag Bearbeiten.
Das Fenster Fahrverhalten öffnet sich.
4. Wählen Sie das Register Fahrzeugfolgemodell.
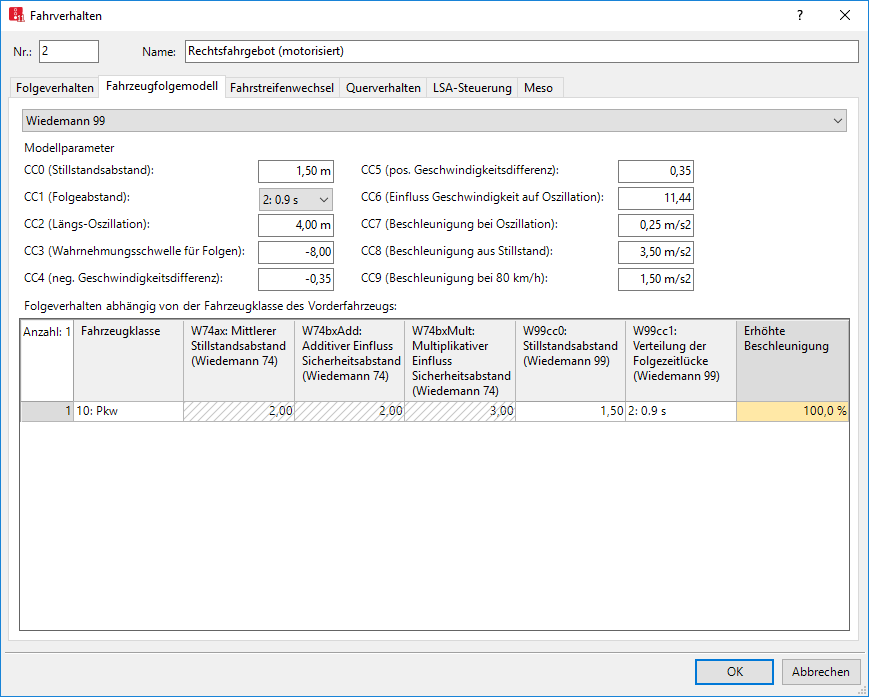
5. Geben Sie die gewünschten Daten ein.
| Element | Beschreibung |
|---|---|
|
Auswahlliste |
Fahrzeugfolgemodell für das Fahrzeugfolgeverhalten. In Abhängigkeit vom gewählten Fahrzeugfolgemodell ändern sich die Modellparameter.
|
|
Modellparameter |
Zeigt abhängig vom gewählten Fahrzeugfolgemodell unterschiedliche Parameter an
Modellparameter beeinflussen auch die Sättigungsverkehrsstärke. |
Folgeverhalten abhängig von der Fahrzeugklasse des Vorderfahrzeugs definieren
Sie können die Modellparameter für das Fahrzeugfolgemodell nach Wiedemann 74 und Wiedemann 99 abhängig von der Fahrzeugklasse des vorausfahrenden Fahrzeugs definieren. Dies ist für jede definierte Fahrzeugklasse möglich. Dieses Folgeverhalten wirkt ab dem Einsetzen des Fahrzeugs am Fahrzeugzufluss.
1. Wenn Sie die Modellparameter abhängig von mehreren Fahrzeugklassen verändern möchten, führen Sie die folgenden Schritte für jede gewünschte Fahrzeugklasse nacheinander aus:
2. Klicken Sie mit der rechten Maustaste in den Bereich Folgeverhalten abhängig von der Fahrzeugklasse des Vorderfahrzeugs.
3. Wählen Sie im Kontextmenü Hinzufügen aus.
Eine neue Zeile wird eingefügt. Die Zeile enthält die Modellparameter für die Fahrzeugklasse mit der niedrigsten Nummer, die noch nicht angezeigt wird. Alle für das Folgeverhalten relevanten Modellparameter der Fahrzeugfolgemodelle Wiedemann 74 und Wiedemann 99 werden angezeigt (Wiedemann 74-Modellparameter definieren),(Wiedemann 99-Modellparameter definieren). In der Spalte Erhöhte Beschleunigung können Sie das definieren, ob das Fahrzeug zurückfällt oder beschleunigt, falls das Vorderfahrzeug beschleunigt (Fahrverhaltensparameter Folgeverhalten bearbeiten).
Die Modellparameter des nicht ausgewählten Fahrzeugfolgemodells sind schraffiert als nicht relevant gekennzeichnet.
4. Geben Sie für die Attribute in den nicht schraffierten Feldern die Werte ein, die für das Folgeverhalten des Fahrzeugs abweichend von den standardmäßig definierten Werten gelten sollen.
Übergeordnetes Thema:
Fahrverhaltensparametersätze definieren
Informationen zum Bearbeiten:
Fahrverhaltensparameter auf den Registern bearbeiten
Fahrverhaltensparameter in der Liste Fahrverhalten bearbeiten
Fahrverhaltensparameter bearbeiten
Fahrverhaltensparameter Folgeverhalten bearbeiten
Entscheidungsmodelle für Fahrstreifenwechsel
Fahrverhaltensparameter Fahrstreifenwechsel bearbeiten
Fahrverhaltensparameter Querverhalten bearbeiten
Beispiel Querverhalten modellieren
Zugehörige Themen:
