Fahrverhaltensparameter Autonomes Fahren bearbeiten
Für die Simulation autonom fahrender Fahrzeuge, insbesondere der von Kolonnenfahrten elektronisch gekoppelter Fahrzeuge (Platooning), können Sie Attribute für das Fahrverhalten festlegen, deren Werte sich von denen der Attributen unterscheidet, die das menschliche Fahrverhalten abbilden.
Vissim berücksichtigt für Platoons und die Fahrzeuge im Platoon spezifische Eigenschaften und Verhalten (Eigenschaften des Platoons und der Fahrzeuge des Platoons).
|
|
Hinweise:
|
Beispiele für die Simulation typischer Verkehrssituationen
- Fahrzeuge bilden auf einem Fahrstreifen eines definierten Streckenabschnitts einer Autobahn ein Platoon und fahren im Platoon weiter. Das Platoon löst sich stromabwärts des Streckenabschnitts wieder auf.
- Ein Fahrzeug schließt zu einem Platoon auf und wird Teil des Platoons.
- Das Führungsfahrzeug des Platoons schließt auf ein Fahrzeug auf und das Fahrzeug wird Teil des Platoons.
- Ein Fahrzeug verlässt das Platoon, um seiner Route oder seinem Weg zu folgen und dafür eine Autobahnausfahrt zu benutzen.
Simulationsergebnisse verwenden
Die Auswertung der Simulationsergebnisse des Platooning kann helfen, beispielsweise folgende Fragestellungen beantworten:
- In welchem Maß verändert Platooning die Standzeit auf Autobahnauffahrten?
- Wie wirkt sich dabei die Anzahl der Fahrzeuge im Platoon aus?
- In welchem Maß verändert Platooning die Kapazität auf einem Streckenabschnitt?
|
|
Tipp: Beispiele zu autonom fahrenden Fahrzeugen finden Sie im Verzeichnis ..\Examples Training\Autonomous Vehicles (AV). |

Beispiel-Video: Platooning in der Simulation
Fahrzeuge nähern sich Vorderfahrzeugen an und bilden ein Platoon. Dies visualisiert Vissim mit Hilfe des Grafikparameters Zeichnenmodus > Farbschema verwenden > Index im Platoon der Fahrzeuge im Netz:
Attribute für das Fahrverhalten Autonomes Fahren auswählen
1. Wählen Sie im Menü Basisdaten > Fahrverhalten.
Die Liste Fahrverhalten öffnet sich. Einige Fahrverhaltensparametersätze können vordefiniert sein.
Sie können die Liste standardmäßig bearbeiten (Listen verwenden).
Sie können alle Fahrverhaltensparameter in der Liste ändern oder mit folgenden Schritten in Registern.

|
Hinweise:
|

2. Klicken Sie mit der rechten Maustaste auf den gewünschten Eintrag.
3. Wählen Sie im Kontextmenü den Eintrag Bearbeiten.
Das Fenster Fahrverhalten öffnet sich.
4. Wählen Sie das Register Autonomes Fahren.
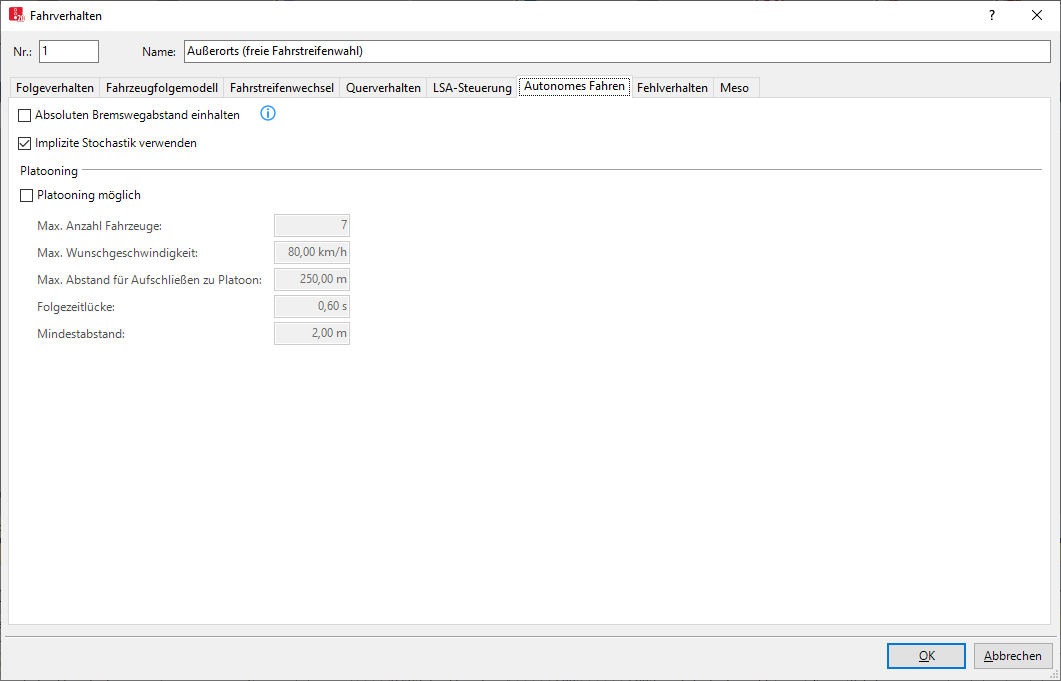
5. Geben Sie die gewünschten Daten ein.
| Element | Beschreibung |
|---|---|
|
Absoluten Bremswegabstand einhalten |
AbsBremsWegAbstEinh: Das Fahrzeug berücksichtigt als Bremsweg die Distanz, die für das Anhalten mit maximaler Bremsverzögerung notwendig ist, ohne, dass es zu einer Kollision kommt, falls das vorausfahrende Fahrzeug ohne Bremsweg sofort zum Stehen kommt. Der absolute Bremswegabstand wirkt auf Fahrzeuge in folgenden Fällen:
Der absolute Bremswegabstand wirkt nicht bei Querverkehrsstörungen. |
|
Implizite Stochastik verwenden |
ImplizStochVerw:
|
|
Bereich Platooning |
|
|
Platooning möglich |
PlatoonMögl: Aktiviert das Platooning, Fahrzeuge können im Platoon fahren. |
|
Max. Anzahl Fahrzeuge |
Platooning - Maximale Anzahl Fahrzeuge (PlatoonMaxAnzFz): Maximale Anzahl der Fahrzeuge, die im Platoon fahren dürfen. Dazu zählen auch Fahrzeuge, die das Platoon verlassen möchten. Standardwert 7 |
|
Max. Wunschgeschwindigkeit |
Maximale Platoon-Wunschgeschwindigkeit (MaxPlatoonvWunsch): Maximale Geschwindigkeit, mit der alle Fahrzeuge im Platoon fahren, Standardwert 80.00 km/h. Das Führungsfahrzeug und die Folgefahrzeuge verwenden die Maximale Platoon-Wunschgeschwindigkeit auch, wenn diese von der Wunschgeschwindigkeit abweicht, die für jedes der Fahrzeuge standardmäßig gilt, wenn es außerhalb des Platoons fährt. In einem Langsamfahrbereich ist die maximale Platoon-Wunschgeschwindigkeit nicht höher als die Geschwindigkeit, die im Langsamfahrbereich gilt. |
|
Max. Abstand für Aufschließen zu Platoon |
Maximaler Abstand für Aufschließen zu Platoon (MaxPlatoonAufschlAbst): Maximaler Abstand in m bis zu dem ein Fahrzeug versucht, auf das letzte Fahrzeug eines Platoons aufzuschließen und damit Folgefahrzeug dieses Platoons zu werden. Standardwert 250.00 m. |
|
Folgezeitlücke |
Platooning - Folgezeitlücke (PlatoonFolgZeitl): Folgezeitlücke zwischen Fahrzeug und Vorderfahrzeug innerhalb des Platoons (Wunschgeschwindigkeit und Sicherheitsabstand im Platoon). Standardwert 0.60 s |
|
Mindestabstand |
Platooning - Mindestabstand (PlatoonMinAbst): Minimaler Abstand in m des Fahrzeugs zum Vorderfahrzeug innerhalb des Platoons (Wunschgeschwindigkeit und Sicherheitsabstand im Platoon). Standardwert 2.00 m |
 Ist die Option ausgewählt, verwendet
Ist die Option ausgewählt, verwendet  Ist die Option nicht ausgewählt, verwendet
Ist die Option nicht ausgewählt, verwendet Für Fahrzeuge im Platoon können Sie den Fahrzustand, den Interaktionszustand und die Position im Platoon (Index im Platoon) aus der Simulation in der Liste Fahrzeuge im Netz anzeigen (Fahrzeuge im Netz in einer Liste anzeigen).
Übergeordnetes Thema:
Fahrverhaltensparametersätze definieren
Informationen zum Bearbeiten:
Fahrverhaltensparameter auf den Registern bearbeiten
Fahrverhaltensparameter in der Liste Fahrverhalten bearbeiten
Fahrverhaltensparameter bearbeiten
Fahrverhaltensparameter Folgeverhalten bearbeiten
Entscheidungsmodelle für Fahrstreifenwechsel
Fahrverhaltensparameter Fahrstreifenwechsel bearbeiten
Fahrverhaltensparameter Querverhalten bearbeiten
Beispiel Querverhalten modellieren
Zugehörige Themen:
