Fahrverhaltensparameter Querverhalten bearbeiten
Standardmäßig benutzt in Vissim ein Fahrzeug die gesamte Breite des Fahrstreifens. Sie können in den Fahrverhaltensparametern Querverhalten definieren, ob die Fahrzeuge innerhalb des Fahrstreifens links, rechts, in der Mitte oder ohne Vorgabe einer seitlichen Ausrichtung fahren können. Falls der Fahrstreifen breit genug ist und die Attribute im Bereich Standardverhalten beim Überholen auf dem gleichen Fahrstreifen oder Nachbar-Fahrstreifen das Überholen auf dem gleichen Fahrstreifen zulassen, sind auch Überholvorgänge innerhalb des Fahrstreifens möglich. Wenn die Maximalverzögerung des überholenden Fahrzeugs verhindert, dass das Fahrzeug rechtzeitig bremsen kann, überholt das Fahrzeug nach Möglichkeit das andere Fahrzeug, auch wenn das aufgrund der Fahrverhaltensparameter Nächste Abbiegerichtung berücksichtigen und Mindestseitenabstand nicht zulässig ist. Damit wird unerlaubtes Überholen einem Zusammenstoß vorgezogen.
Außerdem werden diese Einstellungen berücksichtigt, wenn die Option Nachbarfahrstreifen beachten ausgewählt ist.
1. Wählen Sie im Menü Basisdaten > Fahrverhalten.
Die Liste Fahrverhalten öffnet sich. Einige Fahrverhaltensparametersätze können vordefiniert sein.
Sie können alle Fahrverhaltensparameter in der Liste ändern oder mit folgenden Schritten in Registern.

|
Hinweise:
|

Sie können die Liste standardmäßig bearbeiten (Listen verwenden).
2. Klicken Sie mit der rechten Maustaste auf den gewünschten Eintrag.
3. Wählen Sie im Kontextmenü den Eintrag Bearbeiten.
Das Fenster Fahrverhalten öffnet sich.
4. Wählen Sie das Register Querverhalten.
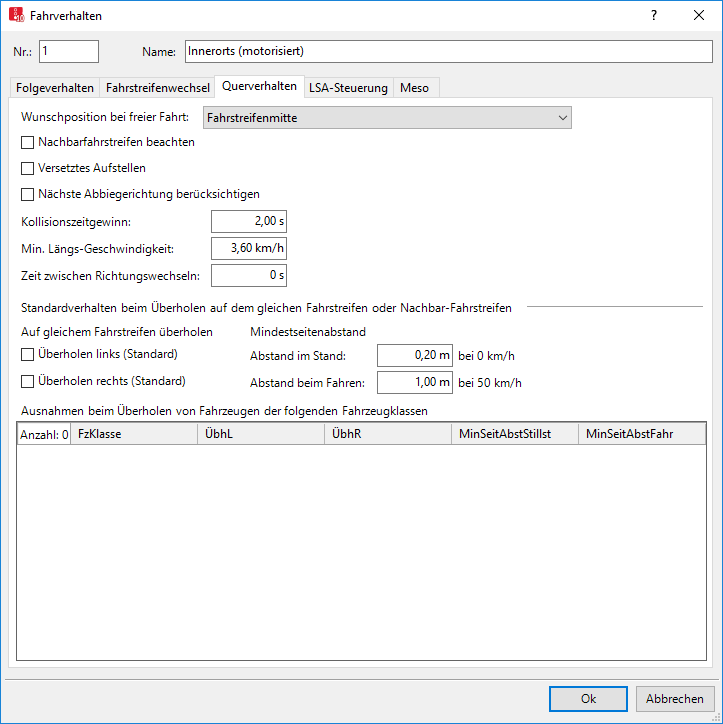
5. Nehmen Sie die gewünschten Einstellungen vor:
| Element | Beschreibung | ||
|---|---|---|---|
|
Wunschposition bei freier Fahrt |
Wunschquerposition bei freier Fahrt (WunschQuerPos): Seitliche Ausrichtung eines Fahrzeugs innerhalb seines Fahrstreifens bei freiem Verkehrsfluss. Wenn Sie in den Netzeinstellungen die Verkehrsregeln ändern, ändert Vissim die Attributwerte Rechts in Links und Links in Rechts (Netzeinstellungen für das Fahrzeugverhalten auswählen). |
||
|
Nachbarfahrstreifen beachten |
NachbFsBeacht:
|
||
|
Versetztes Aufstellen |
VersAufst: |
||
|
Nächste Abbiegerichtung berücksichtigen |
NächAbbBerück: Ermöglicht ein Querverhalten, das bei nicht fahrstreifengebundenem Verkehr ein anderes Fahrzeug folgendermaßen berücksichtigt: Die Option Nächste Abbiegerichtung berücksichtigen berücksichtigt auch das Attribut Richtungswunsch der nächsten Verbindungsstrecke der Route des Fahrzeugs (Attribute von Verbindungsstrecken). Ist für dieses Attribut beispielsweise links ausgewählt, fährt das Fahrzeug nur dann rechts an dem anderen Fahrzeug vorbei, wenn dieses spätestens an der gleichen Verbindungsstrecke abbiegt. Wenn sich das Fahrzeug innerhalb der im Attribut Fahrstreifenwechseldistanz angegebenen Entfernung dieser Verbindungsstrecke befindet, orientiert es sich zur jeweiligen Seite seines Fahrstreifens hin, wenn in diesem ausreichend Platz ist. Gleichzeitig vermeiden Fahrzeuge, die nicht bei der gleichen Verbindungsstrecke oder noch davor ebenfalls in diese Richtung abbiegen wollen, das Fahrzeug auf dieser Seite zu überholen, da dies an der nächsten Kreuzung einen Zusammenstoß verursachen würde. Das Fahrzeug blinkt, wenn folgende Bedingungen erfüllt sind:
|
||
|
Kollisionszeitgewinn |
Minimaler Kollisionszeitgewinn (MinKollzeitGewinn): Mindestwert für die Vergrößerung der Kollisionszeit mit dem nächsten Fahrzeug oder Signalgeber, die durch eine Seitwärtsbewegung auf dem Fahrstreifen erreicht werden muss, so dass diese als lohnenswert empfunden und durchgeführt wird. Die Kollisionszeit wird anhand der Wunschgeschwindigkeit des Fahrzeugs errechnet. Der Standardwert für den Kollisionszeitgewinn ist zwei Sekunden. Kleinere Werte führen zu einem lebhafteren Querverhalten, da Fahrzeuge auch schon für kleinere Verbesserungen seitwärts ausweichen. Standardwert 2.0 s |
||
|
Min. Längs-Geschwindigkeit |
Minimale Längs-Geschwindigkeit für Querbewegung (MinGeschwQuer): Mindestwert der Längsgeschwindigkeit, der noch eine Bewegung zur Seite erlaubt. Der Standardwert von 1 km/h ermöglicht, dass Fahrzeuge sich auch dann noch seitlich bewegen, wenn sie bereits fast zum Stillstand gekommen sind. |
||
|
Zeit zwischen Richtungswechseln |
Minimale Zeit zwischen Richtungswechseln (Querverhalten)(RiWechsMinZeit): Standardwert 0.0 s legt fest, wie viel Simulationszeit zwischen dem Beginn einer Querbewegung in eine Richtung und dem Beginn einer Querbewegung in die umgekehrte Richtung mindestens vergehen muss. Je größer dieser Wert ist, umso geringer sind Seitwärtsbewegungen der Fahrzeuge. Seitwärtsbewegungen finden nur statt, wenn Überholen auf dem gleichen Fahrstreifen erlaubt ist. Die Querbewegung für einen Fahrstreifenwechsel wird von diesem Attribut nicht beeinflusst. |
||
|
Standardverhalten beim Überholen auf dem gleichen Fahrstreifen oder Nachbar-Fahrstreifen |
Gilt für alle Fahrzeugklassen, ausgenommen den im Bereich Ausnahmen beim Überholen von Fahrzeugen der folgenden Fahrzeugklassen eingetragenen Fahrzeugklassen.
Der Mindestseitenabstand wird multipliziert mit dem stochastischen Wert z:
|
||
|
Ausnahmen beim Überholen von Fahrzeugen der folgenden Fahrzeugklassen |
Vom Standardverhalten beim Überholen auf dem gleichen Fahrstreifen oder Nachbar-Fahrstreifen abweichendes Verhalten für bestimmte Fahrzeugklassen. Für die Modellierung von nicht fahrstreifengebundenem Verkehr können Sie Fahrzeugklassen auswählen, die innerhalb eines Fahrstreifens von Fahrzeugen dieses Fahrverhaltensparametersatzes überholt werden dürfen. 1. Klicken Sie mit der rechten Maustaste in die Liste. 2. Wählen Sie im Kontextmenü den Eintrag Hinzufügen. Eine neue Zeile mit Standarddaten wird eingefügt. 3. Nehmen Sie die gewünschten Einstellungen vor:
|
 Ist die Option ausgewählt, berücksichtigen Fahrzeuge die Position und damit die seitliche Ausrichtung von Fahrzeugen in benachbarten Fahrstreifen und halten den im Attribut
Ist die Option ausgewählt, berücksichtigen Fahrzeuge die Position und damit die seitliche Ausrichtung von Fahrzeugen in benachbarten Fahrstreifen und halten den im Attribut  Ist die Option nicht ausgewählt, werden Fahrzeuge auf dem Nachbarfahrstreifen ignoriert, sogar wenn sie breiter als ihr Fahrstreifen sind, außer wenn sie einen Fahrstreifenwechsel durchführen.
Ist die Option nicht ausgewählt, werden Fahrzeuge auf dem Nachbarfahrstreifen ignoriert, sogar wenn sie breiter als ihr Fahrstreifen sind, außer wenn sie einen Fahrstreifenwechsel durchführen.Übergeordnetes Thema:
Fahrverhaltensparametersätze definieren
Zugehörige Themen:
Fahrzustände im Verkehrsflussmodell nach Wiedemann
Wiedemann 74-Modellparameter definieren
Wiedemann 99-Modellparameter definieren
Fahrverhaltensparameter Fahrzeugfolgemodell bearbeiten
Fahrverhaltensparameter LSA-Steuerung bearbeiten
Fahrverhaltensparameter Autonomes Fahren bearbeiten
Eigenschaften des Platoons und der Fahrzeuge im Platoon
Fahrverhaltensparameter Fehlverhalten bearbeiten
Fahrverhaltensparameter Meso bearbeiten
