Konfliktflächen verwenden
Sie können mit den automatisch angezeigten Konfliktflächen über Vorfahrtsregelungen die Konflikte zwischen Fahrzeugen auf zwei Strecken oder Verbindungsstrecken modellieren (Vorfahrtsregelung in Konfliktflächen definieren).
Wenn Sie die Vorfahrt an Kreuzungen modellieren, verwenden Sie Konfliktflächen statt Querverkehrsstörungen. Konfliktflächen werden automatisch angezeigt, sind einfacher zu bearbeiten und bilden das Fahrverhalten besser als Querverkehrsstörungen ab (Konfliktflächen bilden Fahrverhalten besser als Querverkehrsstörungen ab).
Sie können Konfliktflächen auch für die Vorfahrtsregelungen zwischen Fahrzeugen und Fußgängern modellieren (Konfliktflächen für Fußgänger modellieren).
Konflikttypen mit Konfliktflächen modellieren
An einer Konfliktfläche können folgende Konflikttypen auftreten:
- Kreuzung: sich kreuzende Strecken
- Einmündung:
- Zwei Verbindungsstrecken führen auf die gleiche Strecke oder eine Verbindungsstrecke führt auf eine Strecke, auf welcher weiterer Verkehr von stromaufwärts kommt.
- In einer Verbindungsstrecke reduzieren sich zwei Fahrstreifen bis zum Ende der Verbindungsstrecke auf einen Fahrtstreifen.
- Verzweigung:
- Zwei Verbindungsstrecken gehen von der gleichen Strecke ab oder eine Verbindungsstrecke geht von einer Strecke ab, welche selbst stromabwärts noch mehr als 0.5 m weitergeht.
- In einer Verbindungsstrecke weitet sich ein Fahrstreifen bis zum Ende der Verbindungsstrecke auf zwei Fahrtstreifen auf.
Standardmäßig ist an der Konfliktfläche das Attribut Konflikttyp automatisch ermitteln ausgewählt ist. Damit legt Vissim für die Konfliktfläche den Konflikttyp fest (Attribute von Konfliktflächen).
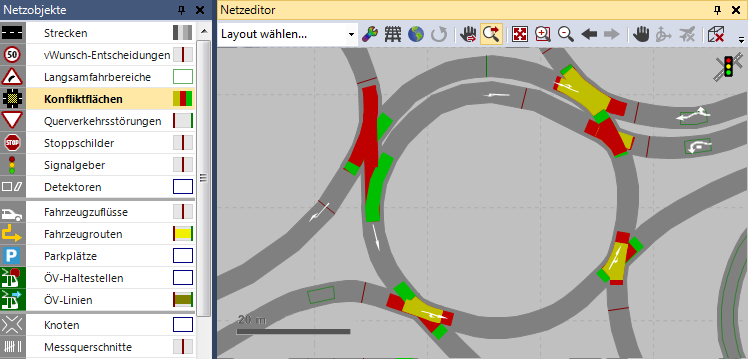
Konfliktflächen darstellen
Wenn Sie in der Netzobjektleiste auf Konfliktflächen klicken, werden Konfliktflächen im Netz automatisch an der Position angezeigt, an der sich zwei Strecken oder Verbindungsstrecken überlappen. Für jede Konfliktfläche können Sie die Strecke auswählen, die Vorfahrt hat. Die Konfliktfläche kann auch passiv bleiben und damit keinen Einfluss auf die Fahrzeuge haben.
Konfliktflächen werden in folgenden Fällen nicht eingefügt:
- wenn sich die Höhe (z-Koordinate) der beiden Strecken oder mit der Verbindungsstrecke im Überlappungsbereich um mehr als 1.0 m unterscheidet
- wenn die Überlappung kürzer oder gleich 0.5 m ist
- wenn mindestens eine der Strecken früher als 5 m nach dem Beginn der Konfliktfläche endet und darin keine Verbindungsstrecke beginnt. Dies gilt nicht für folgende Strecken:
- Verbindungsstrecken
- Strecken, die als Fußgängerflächen definiert sind (Strecken als Fußgängerflächen modellieren).
- Strecken mit Zuflüssen mit einer Fahrzeug-Zusammensetzung, die Fahrzeugtypen der Kategorie Fußgänger enthält (Fahrzeug-Zusammensetzungen modellieren)
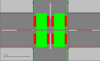
Richtung anzeigen, in der Konfliktflächen wirkt
Wenn Sie im Netzeditor auf eine Konfliktfläche klicken, zeigt ein Pfeil die Richtung an, in der die Konfliktfläche wirkt. Die Konfliktfläche wird heller dargestellt:
![]()
Dabei kennzeichnen die Buchstaben A und B die Strecken. Dies ermöglicht die Strecken mit den Werten in der Spalte Status der Liste Konfliktflächen zu vergleichen.
Konfliktflächen bilden Fahrverhalten besser als Querverkehrsstörungen ab
Konfliktflächen bilden gegenüber Querverkehrsstörungen das Fahrverhalten von Fahrern besser ab, da in Konfliktflächen die Fahrer planen, wie sie die Konfliktfläche überqueren:
Ein wartepflichtiger Fahrer beobachtet die Fahrzeuge im Hauptstrom und entscheidet, wann er einfährt. Dabei plant er einen Beschleunigungsverlauf für die nächsten Sekunden. Der Beschleunigungsverlauf ermöglicht ihm, die Konfliktfläche zu durchfahren. Dabei berücksichtigt er die Situation stromabwärts der Konfliktfläche. Wenn er weiß, dass er dort wegen anderer Fahrzeuge anhalten oder langsamer fahren muss, veranschlagt er mehr Zeit für das Überqueren der Konfliktfläche oder entschließt sich, noch zu warten.
Auch die Fahrzeuge im Hauptstrom reagieren auf die Konfliktflächen: Wenn ein kreuzendes Fahrzeug die Fläche nicht vollständig überqueren konnte, weil der Fahrer die Situation falsch eingeschätzt hat, bremst das Fahrzeug im Hauptstrom oder hält an. Falls sich ausgehend von einer Lichtsignalanlage stromabwärts der Konfliktfläche ein Stau bildet, versuchen die Fahrer der Fahrzeuge im Hauptstrom, nicht auf der Konfliktfläche zu halten, um den kreuzenden Verkehr nicht zu blockieren. Die vorfahrtberechtigten Fahrer führen für das Überqueren der Konfliktfläche einen vergleichbaren Entscheidungsprozess durch, wie die Fahrer der wartepflichtigen Fahrzeuge.
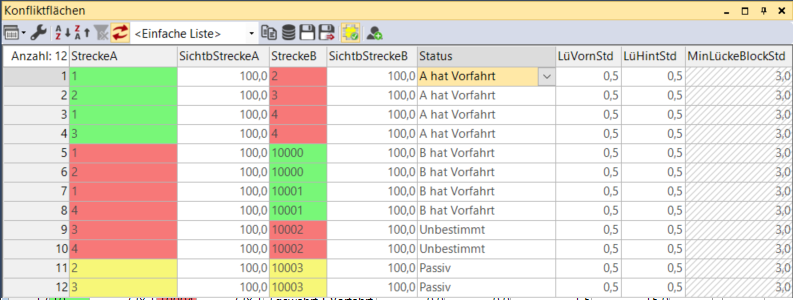
Farben kennzeichnen den Status von Konfliktflächen
Der Status der Konfliktflächen wird in der Liste Konfliktflächen und im Netzeditor angezeigt:
- Grün: Hauptstrom (vorfahrtberechtigt)
- Rot: Nebenstrom (wartepflichtig)
- Beide Rot: Für Verzweigungen, damit Fahrzeuge einander wahrnehmen können. Ohne Vorfahrtsregelung, da sich die ursprüngliche Reihenfolge der Fahrzeuge nicht ändert.
- Beide Gelb: passive Konfliktfläche ohne Vorfahrtsregelung
Im Netzeditor:
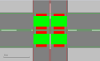
Beispiel: Darstellung der verschiedenen Status

Fahrverhalten von Fahrzeugen an Konfliktflächen
Das Fahrverhalten von Fahrzeugen, die auf eine Konfliktfläche zufahren, soll die maximale Kapazität für den Nebenstrom herstellen, ohne die Fahrzeuge im Hauptstrom zu beeinträchtigen. Bei einer Einmündung können Fahrzeuge im Hauptstrom behindert werden, und zwar umso mehr, je kleiner der benutzerdefinierte Faktor für den Sicherheitsabstand ist.
- Ein Fahrzeug im Nebenstrom ermittelt während der Zufahrt auf die Konfliktfläche in jedem Zeitschritt, ob beim Erreichen der Konfliktfläche voraussichtlich eine ausreichende Lücke im Hauptstrom vorliegen wird. Dabei werden Sicherheitsabstände berücksichtigt (Wiedemann 74-Modellparameter definieren), (Wiedemann 99-Modellparameter definieren). Falls eine ausreichende Lücke im Hauptstrom vorliegt, fährt es normal weiter. Falls nicht, verhält es sich so, als ob es vor der Konfliktfläche zum Halten kommen muss. Im nächsten Zeitschritt wird diese Berechnung wiederholt. Dadurch kann ein Bremsvorgang abgebrochen und sogar eine Beschleunigung eingeleitet werden, beispielsweise zum „Zielen“ auf eine spätere Lücke.
- Ein Fahrzeug im Hauptstrom versucht, nicht mit Fahrzeugen im Nebenstrom zu kollidieren. Wenn es feststellt, dass sich ein Fahrzeug im Nebenstrom auf der Konfliktfläche befinden wird, wenn es selbst dort eintrifft, bremst es so, dass es die Konfliktfläche erst dann erreicht, wenn das Fahrzeug im Nebenstrom die Konfliktfläche gerade verlassen hat. Aufgrund dieser Verzögerung trifft es später auf der Konfliktfläche ein und kann seine Fahrt möglicherweise fortsetzen ohne nochmaliges Bremsen in einem späteren Zeitschritt, so dass es direkt nach dem Fahrzeug auf der Nebenstrecke passiert.
- Ein Fahrzeug im Nebenstrom versucht, vor einer Konfliktfläche zu bremsen, wenn stromabwärts von ihr nicht genug Platz ist, um sie zu verlassen. Das bedeutet insbesondere, dass mehrere aufeinander folgende Konfliktflächen nur komplett durchfahren werden oder aber gar nicht, wenn zwischen ihnen nicht genug Platz für die ganze Fahrzeuglänge ist.
- Bei einer Konfliktfläche im Konflikttyp Kreuzung versucht auch ein Fahrzeug im Hauptstrom, die Konfliktfläche freizuhalten, falls das Fahrzeug zu dem Prozentsatz gehört, der im Attribut Vermeide Blockieren eingestellt ist (Attribute von Konfliktflächen).
|
|
Hinweis: Eine Konfliktfläche mit Konflikttyp Einmündung oder Verzweigung wird von Fahrzeugen im Hauptstrom nicht freigehalten. Um dies zu erreichen, müssen Sie eine Querverkehrsstörung anlegen (Querverkehrsstörung Beispiel 2: Vermeidung von Rückstaus innerhalb einer Kreuzung) |

- Ein Fahrzeug des Nebenstroms befährt eine Konfliktfläche nicht, wenn es annehmen muss, dass es die Konfliktfläche nicht rechtzeitig verlassen kann, bevor ein Fahrzeug des Hauptstroms kommt. Dabei wird der Sicherheitsabstand berücksichtigt (Attribute von Konfliktflächen).
- Ein Fahrzeug des Nebenstroms, das eine Konfliktfläche bereits befahren hat, wird immer versuchen, diese zu verlassen, auch wenn das bedeutet, eine andere Konfliktfläche zu befahren, obwohl für diese die Bedingung Lücken nicht oder nicht mehr erfüllt ist.
- Um eine Kollision zu vermeiden, kann ein Fahrzeug vorübergehend auf einer Kreuzung innerhalb einer roten Konfliktfläche anhalten. Wenn ein Fahrzeug A erkennt, dass ein Fahrzeug B eine Konfliktfläche demnächst verlassen wird, kann Fahrzeug A auf diesen Zeitpunkt innerhalb einer anderen Konfliktfläche warten, in der A keine Vorfahrt hat.
- Wenn ein Fahrzeug auf einer Konfliktfläche wartet, nutzt es die nächste, ausreichend große Zeitlücke um loszufahren. Dieses Verhalten kann bei einem wartepflichtigen Fahrzeug auch dann auftreten, wenn es einem vorfahrtberechtigten Fahrzeug Vorrang gewähren müsste. Beispiel: Ein Fahrzeug im Nebenstrom möchte in den Hauptstrom einbiegen und wartet vor der Kreuzung auf einer Konfliktfläche wegen des vorfahrtberechtigten Fahrzeugs im Hauptstrom. Das Fahrzeug im Hauptstrom möchte links in den Nebenstrom abbiegen und wartet wegen eines im Hauptstrom entgegenkommenden Fahrzeugs ebenfalls auf einer Konfliktfläche. Wenn die Zeitlücke für das Fahrzeug im Nebenstrom jedoch ausreichend groß ist, dass es trotz der beiden Fahrzeuge im Hauptstrom in diesen einbiegen kann, verlässt es seine Konfliktfläche und biegt in den Hauptstrom ein. Wenn ein Fahrzeug eine Mindestweglücke berücksichtigen soll, definieren Sie eine Querverkehrsstörung (Querverkehrsstörungen modellieren).
Übergeordnetes Thema:
Vorfahrtsregelungen ohne LSA modellieren
Informationen zum Bearbeiten:
Vorfahrtsregelung in Konfliktflächen definieren
Mit Hauptstrom Vorfahrtsregelung für Konfliktflächen definieren
Zugehörige Themen:
