メソネットワークノードの定義のルールと例
Vissimがメソスコピックシミュレーションで交錯をリアルにモデリングできるように、メソネットワークノードを正しくモデリングする必要があります。正確性のレベルは、メソスコピックシミュレーションでの動的配分の結果に決定的な影響を及ぼすことになります。ネットワークエディターで個々のメソネットワークノードを手動で定義する場合は、メソネットワークノードの定義のルールに従います。
メソネットワークノードの定義のルール
- ルール1:メソネットワークノードは、コネクターの開始点または終了点が1つ以上あるリンク上のどこにでも定義する必要がある。
例外 - 公共交通待避所: 待避所のリンクに向かうコネクターの開始点と終了点、および待避所から元のリンクに向かうコネクターの開始点と終了点では、メソネットワークノードを定義する必要はありません。
- [Rule 2]-[ルール2]:各交差点には、メソネットワークノードを1つ以上定義する必要がある。ノード形状によっては、複数のメソネットワークノードを定義できます。
無信号の交差点には「すべての交錯エリアを定義する」というルールが適用されます。個々のメソネットワークノードに配置する交錯エリアを決定するには、次の点を確認してください。
- 車両はどこで停止すると想定されるか。すべてのターン交錯では、車両はメソネットワークノードで停止します。そのエッジが実際の車両の停止位置(停止線など)と大まかに一致するように、メソネットワークノードをモデリングします。
- メソネットワークノードのすべてのターン交錯に関連するメソネットワークノードに達するための通行権を持つ車両によって、流入側のメソエッジが使用されるか。ノードのサイズと位置によって、通行権を持つ車両がどのメソエッジをエッジと認識するかが決まります (メソ交錯に関連するエッジと関連しないエッジ)。
- 通行権を持つ車両が使用する流入側のメソエッジが、メソネットワークノードに到達するための旅行時間はどのくらいかかるか。この旅行時間は、サブ交通流のメソクリティカルギャップよりも長くなければなりません。
信号設置交差点では、停止位置とストレージ容量が決定因子になります。車両は常にメソネットワークノードで停止します。1つのメソネットワークノードのみでは現実の状況をモデリングできない場合は、チャンネル化された右折の場合など、複数のノードををモデリングします。
- [Rule 3]-[ルール3]:ターンメソエッジの次のプロパティは変更してはならない。
- 車線の数
- リンク挙動タイプ
- メソ速度、メソ速度モデル [Link-related]-[リンク関連] が選択された場合 (メソスコピックシミュレーションの車両追従モデル)
つまり、メソターンの [Defining links]-[リンク定義] のそれぞれが同じ値を持つ必要あるということです (メソターンの属性)。
|
|
注意: メソネットワークノードの定義に適用される制限事項と情報に注意してください ([Creating]-[作成] メソネットワークノード)。 |

メソネットワークノードの定義に対するルールの適用例
次の例は、交差点をモデリングする際に適用されるルールを示しています。まず、メソネットワークノードの影響、交錯エリアで車両が停止する位置、妥当と認識されるエッジの例を紹介します。
次に、さまざまなタイプの交差点のモデリングにルールがどのように影響を与えるかを説明します。さまざまなネットワークオブジェクトに関して、メソグラフ構造とシミュレーションへのルールの影響が示されています。
- 車線の数が変更されたエリアのノード
- [Modeling connectors in meso network nodes]-[メソネットワークノードのコネクターのモデリング]
- 信号設置の交差点のモデリング
- 車線幅員が増大する交差点のモデリング
- バイパスとチャネリングされたターンがある交差点のモデリング
- ラウンドアバウトのモデリング
- [Modeling reduced speed areas on links]-[リンクの減速エリアのモデリング]
- リンクでの信号コントローラーのモデリング
メソネットワークノードの位置が正しい場合誤っている場合の結果
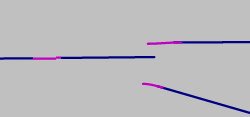
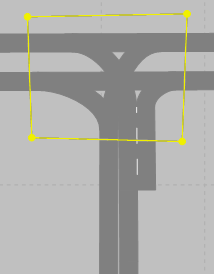
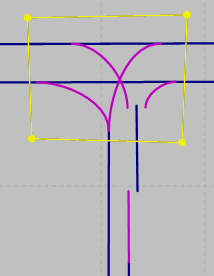
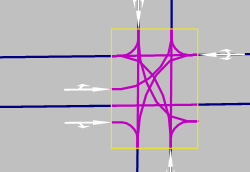
次の例では、9つのターン交錯のある三叉路のエッジにおける、メソクリティカルギャップとしての旅行時間の意味を説明しています。9つのメソネットワークノードは、9つのターン交錯(1~9)において手動で定義されたものです。
![]()
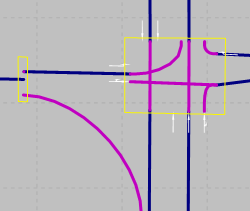
メソネットワークノードに至るエッジの旅行時間が、メソネットワークノードにおける交錯のメソクリティカルギャップよりも短い場合は、このタイプのモデリングは推奨されません。この場合、メソスコピックシミュレーションで交錯が正しくモデリングされません。以下の図はその様子を示しており、説明がその下に記載されています。
|
状況:
|
|---|
|
この交錯は、メソスコピックシミュレーションで正しくモデリングされません。
|
 車両が下方向から接近し、上方向に左折します。
車両が下方向から接近し、上方向に左折します。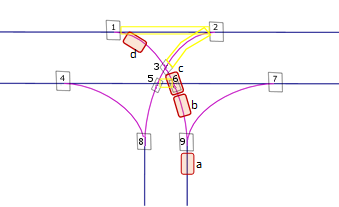
車両が誤った位置に停止し、メソネットワークノードに至るエッジの旅行時間が非常に短くなる場合は、旅行時間がクリティカルギャップとして働きます。次に、Vissimはメソスコピックシミュレーションにおける交錯をリアルにモデリングできません(上図を参照)。
たとえば、ノード3(図の上部)のメソネットワークノードが定義されていない場合、Vissimはその交錯を認識せず、メソスコピックシミュレーションで交錯が無視されます。
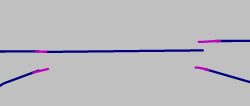
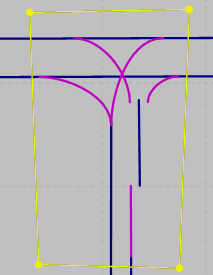
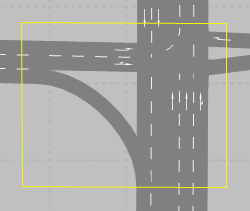
[Solution]-[解決方法:このようなタイプの交差点で交錯間のエッジが短くなるり、定義されたメソネットワークノードが1つだけの場合、Vissimは、メソスコピックシミュレーションで交錯をリアルにモデリングできます。メソネットワークノードが1つだけの場合、左折車両の停止位置はその後のすべての交錯で1つのみとなります。流入側のエッジの旅行時間に十分な長さがあり、車両は正しい位置で停止します。下図はその様子を示しており、説明がその下に記載されています。
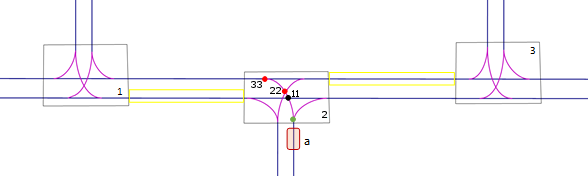
[Correct modeling]-[正しいモデリング]:交錯地点のノードに至るすべてのエッジでの旅行時間に十分長さがある。これにより、車両は必ず正しい位置に停止します。
- 黒い点の交錯11によって、車両は、ノード1からノード2に至るエッジを認識します。このエッジの旅行時間が交錯のメソクリティカルギャップよりも長い場合、指定した値(3.5 sなど)がクリティカルギャップとして使用されます。
- 赤い点の交錯22と33によって、車両は、ノード3と2の間の流入側のエッジを認識します。このエッジの旅行時間が交錯のメソクリティカルギャップよりも長い場合、指定した値(3.5 sなど)がクリティカルギャップとして使用されます。
メソ交錯に関連するエッジと関連しないエッジ
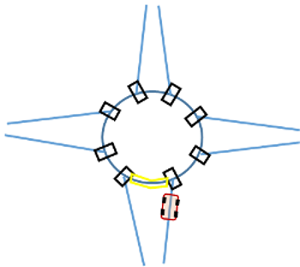
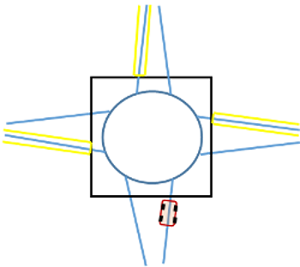
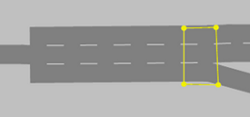
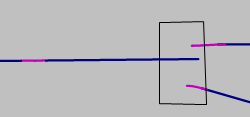
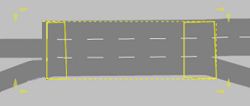
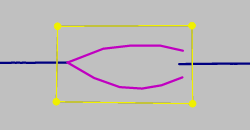
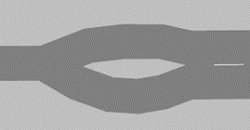
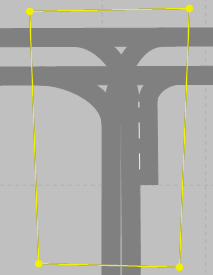
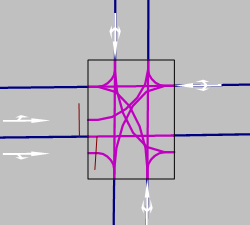
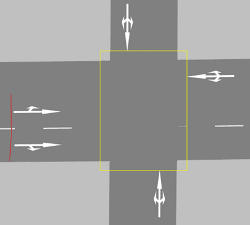
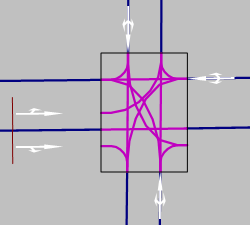
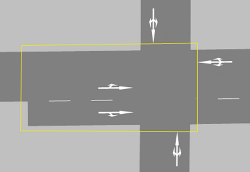
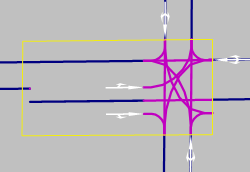
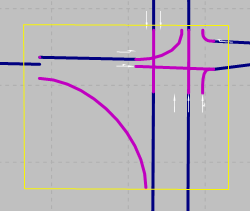
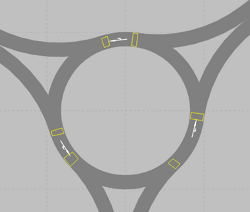
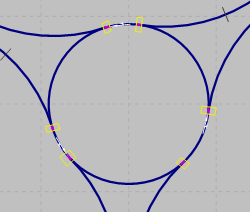
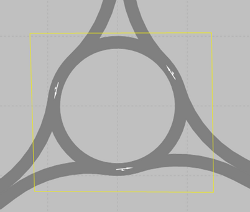
左の図は、複数のメソネットワークノードが正しく配置されているラウンドアバウト(右側通行)の例です。右側の図では、ラウンドアバウトをまたいでメソネットワークノードが1つだけ配置されています。次の2つの図は、メソネットワークノードに停止したときに車両が認識するメソエッジを示しています。
- [Correctly modeled-[正しいモデリング]:左側の図のモデリングでは、車両は関連するメソエッジ(2つのメソネットワークノード間の黄色の部分)を認識します。エッジは、車両の停止位置となる、正しく配置されたメソネットワークノードに直接つながっています。正しいメソクリティカルギャップが使用されます。
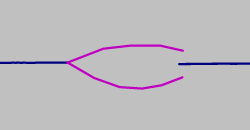
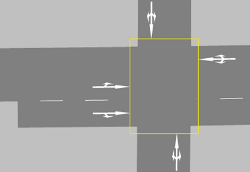
- [Incorrectly modeled-[誤ったモデリング]:右の図のモデリングでは、車両は関連するメソノードを認識できません。メソネットワークノード内の交錯では、例えばラウンドアバウトへの車両の進入に対して、車両は関連性のないメソエッジ(左、上、右からメソネットワークノードにつながる黄でハイライトされた3つのメソエッジ)のみを認識します。車両は、左の図にあるようにはノードを認識することができません。つまり、正しいメソクリティカルギャップを考慮することができません。車両は自らのメソノードしか認識できないため、メソネットワークノードで停止し、右、上、左から来る車両を優先します。
|
正:車両は関連するメソエッジを認識する(下部の2つのメソネットワークノードの間の黄色の部分)。
|
誤:車両は関係のないメソノードのみを認識する(黄色)
|
|---|---|
|
|
|
車線の数が変更されたエリアのノード
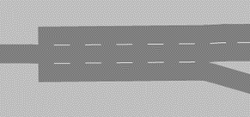
車線の数が変更されたエリアのモデリングにはいくつかの方法があります。これらは、メソスコピックシミュレーションの動的配分にさまざまな方法で影響を及ぼします。下図はその様子を示しており、下表にはその説明が記載されています。
コネクターによって二車線リンクが一車線リンクにつながっています。
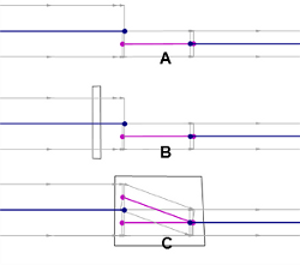
車両はメソノードの終了地点でのみ車線を変更できます。これは、Vissimで自動生成されたメソノードとモデリングされたメソネットワークノードに適用されます (メソスコピックノード-エッジモデル)。
| [Modeling]-[モデリング] | [Situation]-[状況] | [Mesoscopic simulation]-[メソスコピックシミュレーション] |
|---|---|---|
| A |
|
|
| B |
|
|
| C |
|
|
コネクターによって一車線リンクが二車線リンクにつながっています。
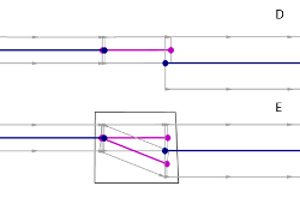
| [Modeling]-[モデリング] | [Situation]-[状況] | [Mesoscopic simulation]-[メソスコピックシミュレーション] |
|---|---|---|
| D |
|
|
| E |
|
|
[Modeling connectors in meso network nodes]-[メソネットワークノードのコネクターのモデリング]
| [Rule]-[ルール] | [Description]-[説明] | |
|---|---|---|
| 1 |
メソネットワークノードは、開始または終了するコネクターが1つ以上あるリンク上に定義する必要がある。 |
|
|
|
|
|
|
正:
|
誤:
|
|
| [Rule]-[ルール] | [Description]-[説明] | |
|---|---|---|
| 1 |
メソネットワークノードは、開始または終了するコネクターが1つ以上あるリンク上に定義する必要がある。 |
|
|
|
|
|
|
正:
|
誤:
|
|


| [Rule]-[ルール] | [Description]-[説明] | |
|---|---|---|
| 1 |
メソネットワークノードは、開始または終了するコネクターが1つ以上あるリンク上に定義する必要がある。 |
|
|
|
一車線リンクから二車線リンクへの移行を2つのコネクターにまたがってモデリングする場合は、これら全体がノード内にある必要がある。 |
|
|
正:
|
誤:
|
|

| [Rule]-[ルール] | [Description]-[説明] | |
|---|---|---|
| 3 |
ターンメソエッジの次のプロパティーを変更してはならない。
|
|
|
|
|
|
|
正:
|
誤:
|
|
信号設置の交差点のモデリング
| [Rule]-[ルール] | [Description]-[説明] | |
|---|---|---|
| 2 |
各交差点には、メソネットワークノードを1つ以上定義する必要がある。ノード形状によっては、複数のメソネットワークノードを定義できます。 |
|
その意味を右下の図に示します: 信号機が交差点のメソネットワークノードから10 mの位置にある場合、Vissimは信号機にメソノードを自動的に生成します。すると、2つのノード間のエッジの長さは10 mになります。このエッジを10 m/sで走行する車両の旅行時間は1 sになります。車両は、メソノードを超えて左側から接近する車両に対して走路を譲るべきかどうかを判断できないため、この秒数は、定義されている実際のメソクリティカルギャップに関係なく、右から接近して左に折する車両のクリティカルギャップとして機能します。クリティカルギャップが1 sでは、車両が他車に譲るための十分な時間の余裕がありません。 解決方法:a)メソネットワークノード内に信号機を配置する、b)信号機とメソネットワークノード間の距離を5 m以内に短縮する、c)ノードにつながるエッジが、エッジの旅行時間がノードのターン交錯のメソクリティカルギャップよりも長くなるのに十分に長いことを確認します。 |
||
|
正:信号機を、メソネットワークノード内または、ノードから5 m以内に設置します。
|
非推奨:メソネットワークノードからの距離が5 mを超える位置に信号機を配置します。
|
|
車線幅員が増大する交差点のモデリング
| [Rule]-[ルール] | [Description]-[説明] | |
|---|---|---|
| 2 |
各交差点には、メソネットワークノードを1つ以上定義する必要がある。ノード形状によっては、複数のメソネットワークノードを定義できます。 |
|
|
||
|
正:
|
誤:
|
|
バイパスとチャネリングされたターンがある交差点のモデリング
| [Rule]-[ルール] | [Description]-[説明] | |
|---|---|---|
| 2 |
各交差点には、メソネットワークノードを1つ以上定義する必要がある。ノード形状によっては、複数のメソネットワークノードを定義できます。 |
|
|
||
|
正:
|
非推奨:
|
|
ラウンドアバウトのモデリング
|
|
注意: 次は、単純なラウンドアバウト(一車線、バイパスなし、あるいはバイパスありの場合でも1つのみ、出入口が少ない場合など)のモデリング時のヒントです。より複雑なラウンドアバウトや、交錯をメソスコピックシミュレーションで正しくモデリングできないラウンドアバウトをモデリングする場合は、セクションを定義し、ハイブリッドシミュレーションを実行します (ハイブリッドシミュレーションの使用)。 |
| [Rule]-[ルール] | [Description]-[説明] | |
|---|---|---|
| 2 |
各交差点には、メソネットワークノードを1つ以上定義する必要がある。ノード形状によっては、複数のメソネットワークノードを定義できます。 |
|
|
||
|
正:
|
誤:
|
|
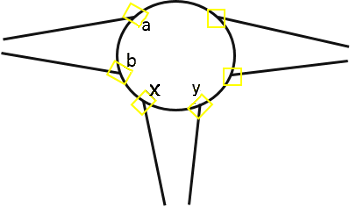
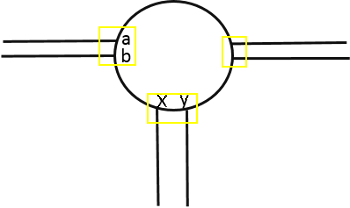
出口と次の入口との間の距離に応じて、[approach A]-[アプローチA]または[approach B]-[アプローチB]のいずれかに従って、ラウンドアバウトのメソネットワークノードをモデリングします。これは、以下の図とその説明に図示されています。
| [Description of approach A]-[アプローチAの説明] | |
|---|---|
|
出口から下流の次の入口までの距離が十分にある場合は、出口と入口のそれぞれにメソネットワークノードを定義します。次のような状況の場合がこれに該当します。
|
|
|
正:
txy > tCG(y)またはtbx < txy
|
ネットワークをVisumからエクスポートし、ANM経由でVissimにインポートする場合、Vissimは、アプローチAに基づいてメソネットワークノードを自動的に生成します。これらのノードを、後で編集し直す必要はありません (ANMインポートから生成されたネットワークオブジェクト)。以下の表には、アプローチAが条件1を満たすための、クリティカルキャップを3.5 sとしたときの、出口xと下流の次の入口yの最短距離を示すさまざまな速度が記載されています。
| ラウンドアバウトの車線における車両速度 | [min. distance [m] x-y to meet condition 1]-[条件1を満たすための最短距離 [m] x-y] | |
|---|---|---|
| m/s | km/h | |
| 1 | 3.6 | 3.5 |
| 2 | 7.2 | 7.0 |
| 3 | 10.8 | 10.5 |
| 5 | 18 | 17.5 |
| 7 | 25.2 | 24.5 |
| 10 | 36 | 35.0 |
| 14 | 50.4 | 49 |
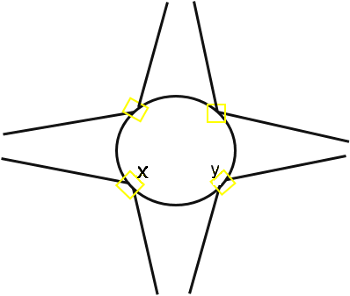
| [Description of approach B]-[アプローチBの説明] | |
|---|---|
|
出口から下流の次の入口までの距離が十分にない場合は、出口と入口の両方に共通のメソネットワークノードを定義します。これは、次の2つの条件が同時に発生した場合に該当します。
|
|
|
正:
tbx > txyかつ txy < tCG(y)
|
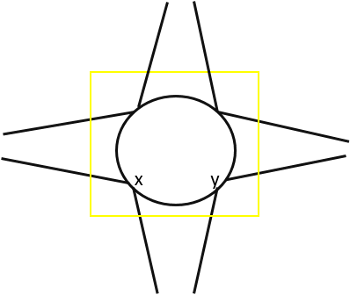
次の2つの図は、誤ったアプローチを使用してメソネットワークノードした場合の例を示しています。これらのアプローチでは、メソスコピックシミュレーションで交錯をモデリングした場合に、正しい結果が表示されません。
|
[Incorrect approach 1]-[誤ったアプローチ1]:入口リから下流の次の出口までの距離が十分にない。結果的に、それぞれのノードで生成される交錯が多くなりすぎます。
[Sokution]-[解決方法]:入口と下流の次の出口が近接している場合は、メソネットワークノード間のエッジが短くなってしまうとしても、アプローチAを使用します。この場合、2つのメソネットワークノードのそれぞれに作成される結合または分岐は1つのみとなります。分岐する交錯では、メソネットワークノードから短いエッジが出ることがあっても問題にはなりません。 |
|
|
|
|
|
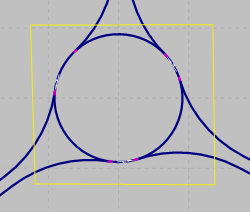
[Incorrect approach 2]-[誤ったアプローチ2](下図):ラウンドアバウトのすべての交錯に対してメソネットワークノードが1つだけ定義されています。結果:交錯はリアルにモデリングされず、車両は誤ったに停止し、交錯の車間時間は関係のないエッジから算出されます。 |
|
|
|
[Modeling reduced speed areas on links]-[リンクの減速エリアのモデリング]
| [Description]-[説明] | |
|---|---|
|
|

|
|

|
リンクでの信号コントローラーのモデリング
| [Description]-[説明] | |
|---|---|
|
|

|
親見出し:
I編集方法については以下参照:
