路肩での駐車および停車のモデリング
駐車および路肩での停車については、次の項目を定義します。
- タイプが [Real parking spaces]-[実際の駐車スペース] の駐車場。属性 [Length]-[長さ] および [Length of each space]-[スペースごとの長さ:] に応じ、駐車場に複数の駐車スペースが含まれる場合があります。駐車スペースは、車線に向かって1つずつ整列されます。
- 1つあるいは複数の車両経路の場合の、[Parking lot]-[駐車場] タイプの車両経路決定。それぞれの車両経路は、車両経路決定から駐車場へつながります (駐車経路の定義)。
[Parking lot]-[駐車場] タイプの車両経路決定は、車両の部分的経路と同様に作用します (車両経路、部分的車両経路および経路決定のモデリング)。ただし、ルートではなく、目的の数の駐車場が割り当てられます。車両経路決定タイプ [Parking Lot]-[駐車場] の属性では、次の属性を指定できます (駐車場の属性)。
- [Parking duration]-[駐車期間]。 車両が駐車すべき期間を決定する、目的の時間分布。
- [Parking rate]-[駐車率]。割り当てられた駐車場の駐車スペースに割り当てる、時間間隔ごとの車両のパーセント。
駐車場と、[Parking Lot]-[駐車場] タイプの車両経路決定の配置
ネットワークエディターでは、駐車スペースの追加と経路決定について、以下のオプションがあります。
- 必要なネットワークオブジェクトとともに駐車場を作成します。
複数の並列駐車スペースを持つ垂直または斜めの駐車場を定義したい場合は、駐車場を追加します (駐車場の作成), (ネットワークエディターで駐車場を作成し、属性を定義)。Vissim は、すべての必要なネットワークオブジェクトVissim network objects]-[ネットワークオブジェクトと交錯に対する保護を作成し、走行路の各方向に対して [Parking Lot]-[駐車場] タイプの新規経路決定を配置します。それを目的の上流位置に移動させる必要があります。(駐車場の駐車経路決定の位置づけ)。
- ネットワークオブジェクトを個別に追加します。
縦方の駐車スペース、垂直の駐車スペース、斜めの駐車スペースを定義したい場合は、駐車スペースと経路決定を個別に追加してください。駐車場は、ネットワークエディタで車線上に作成されます (駐車場の定義)。車線が駐車場の下流へ続いていない場合、最初の下流コネクターの緊急停車位置を駐車場に対して正接させることはできません (コネクターの属性)。
駐車場の始まりは、移動する方向で、対応する [Parking lot]-[駐車場] タイプの車両経路決定のさらに下流に対して十分な距離をとって配置する必要があります。こうすることで、車両は十分な時間をかけて減速し、最初の駐車スペースに到達することができます。そうでなければ、最初の駐車スペースに車両を割り当てることができないか、または車両が割り当てられた駐車スペースを逃して交通流をブロックする可能性があります。
駐車場が単一車線のリンク上に配置されている場合、そこで駐車する車両が、そのリンク上の自由な交通流を阻害する場合があります。時間ステップごとに、この駐車場の駐車スペースに向かっている車両は、別に利用できる駐車スペースがないかチェックします。こうして車両は、可能であれば上へ移動するために、[Attraction]-[魅力度] 属性の値が、下流に位置する駐車スペースが上流に位置する駐車スペースよりも魅力的であるような高いレベルに設定されている場合、さらに下流へと走行します。
車両が経路決定を考慮するための要件
車両がタイプ [Parking lot]-[駐車場]タイプの経路決定を通過した場合、Vissim は車両に駐車経路を割り当てることができるように、以下の基準をチェックします。基準を満たさない場合、車両はルートや経路をたどり続ける。
- 車両にはまだ目的駐車場が割り当てられていない。
- この駐車ルートには、経路決定が定義されている。
- 駐車ルートの時間間隔は十分長い。
- 時間間隔の値は、経路決定属性 [Parking duration]-[駐車期間] と[Parking rate]-[駐車率]で指定される。
- 車両タイプは、経路決定用に選択済みの車両クラスの一部である。
これらの基準が満たされた場合、 [Parking rate]-[駐車率] 属性の分布に基づいて、駐車経路を車両に割り当てることができるかどうかをVissim が決定します。その際、選択済み車両クラスが考慮されます。Vissim は次に、分布から駐車時間が0秒かどうかをチェックします。
基準を満たした場合、車両は駐車スペースを探し、 Vissim は駐車スペースと駐車ルートが車両に割り当てられるかどうかをチェックします。
車両に駐車スペースが割り当てられるための要件
- 駐車ルートを車両に割り当てることができること。
- 駐車経路決定で、 [Full occupancy behavior]-[満員時挙動]属性で [Wait]-[待機]という項目が選択されており、駐車場内のすべての駐車スペースがすでに占有されているわけではなく、各駐車スペースの前で車両がすでに待機中でもないこと。
- 空き駐車スペースは十分に長いこと。
- 駐車場は通常の [opening hours]-[営業時間]に利用できること。
- [Detect blockag]e-[障害物検出] 属性が選択されている場合: 少なくとも1つの駐車スペースが利用可能であること。
- 空き駐車スペースは非常停止位置の下流にあること。
- [Parking lot]-[駐車場] タイプの車両経路決定の [Parking duration]-[駐車期間] 属性で選択された時間分布期間が、駐車場の [Maximum parking duration]-[最大駐車期間] 属性で指定された期間よりも短いこと。
- 十分な駐車容量があること。駐車スペースの駐車容量は、駐車場の長さと、各駐車スペースの長さに基づきます。駐車容量を変更するには、ネットワークエディタで、駐車場の長さを変更します。
車両経路決定による車両に駐車スペースの割り当て
Vissimは、次の属性に応じて駐車スペースを選択します (駐車場の属性)。
- [Length per parking space]-[車両スペースあたりの長さ] 属性に応じた、個々の車両の長さに対して利用できる車両スペース
- [Attraction]-[魅力度]: 最適な駐車スペースは、属性 [Attraction]-[魅力度] に基づいて決定されます。複数の駐車スペースの誘引性が同じである場合、Vissimは均一分布に基づいてその中の1つを選択します。
適切な駐車スペースが見つからない場合、駐車リクエストは却下され、駐車ルートは割り当てられません。車両はそのルートを続行するか、自身の経路をたどります。これは、駐車経路決定を交差する際に、利用可能な駐車スペースのいずれからも車両の現在の経路に戻る方法がないため、車両に駐車スペースを割り当てることができない場合にも当てはまります。
Vissim が適切な駐車スペースを見つける
駐車場が単一駐車スペースのみである場合、その駐車スペースと最大同じ長さの車両であれば駐車することができます。車両は、駐車スペースの長さより少なくとも2cm広い駐車スペースが必要です。
車両が駐車スペースよりも長い場合、Vissimは、2つあるいはそれ以上の隣接するスペースにその車両を収容できるかどうかチェックします。ある車両が駐車場のすべての駐車スペースを占有する場合、その車両は駐車スペースの全長と同じ長さまでであれば駐車することができます。車両が駐車場のすべての駐車スペースは占有しない場合、駐車スペースの全長が車両より0.5m以上長ければ駐車できます。これにより、駐車スペースが十分に確保され、駐車スペースと隣接する他の駐車スペースに駐車スペースを確保することができます。
1台の車両が一部しか使用していない駐車スペースは、他の車両に割り当てられず、占有されているとみなされます。車両は常に、駐車スペースの開始地点で停止します。長い車両が利用できる隣接の駐車スペースが十分にない場合は、駐車せず、ルートの走行を続けます。
駐車スペースまでの車両経路
Vissimは、[Parking lot]-[駐車場] タイプの車両経路決定から、対応する駐車場のそれぞれの駐車スペースまでをつなぐ車両経路を自動的に生成します。これらの内部車両経路を変更することはできません。
駐車車両、駐車場から出る車両、および停車車両の表示
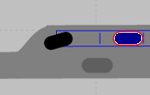
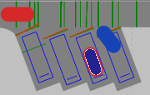
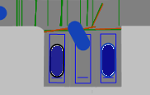
シミュレーション中、並列、斜め、垂直の駐車場で前進または後退する車両や、駐車場から前進または後退する車両の動きがリアルに表示されます。2Dモードでは、車両が駐車スペースの最終駐車位置に達すると、中の車両が青くハイライトされます(デフォルト)。これは駐車状態 [Parked]-[駐車]のカラーに対応します。例:
| [Parallel parking lot]-[平行の駐車場] | [Diagonal parking lot]-[斜めの駐車場] | [Perpendicular parking lot]-[垂直の駐車場] |
|---|---|---|
|
|
|
停車時間分布による駐車期間の定義
駐車場経路決定の [Parking duration]-[駐車期間] 属性では、目的の時間分布を選択できます。車両が旅行方向の駐車スペースに停車し、これまでブロックされていた隣接車線の交通が再度流れ始めた時点で、駐車期間が開始されます。
車両への空き駐車スペースの割り当て
駐車スペースが車両に対して割り当てられておらず、そこに駐車している車両がない場合、その駐車スペースは空きとみなされます。Vissimは、このスペースを車両に割り当てることができます。これは、渋滞などにより、車両によってブロックされているため現在はその駐車スペースに到達できない場合でも、実行されます。
駐車スペースの占有とブロック
以下の場合、駐車スペースは占有されているとみなされ、別の車両に割り当てられません。
- すでに他の車両に割り当てられている場合。車両が、その駐車スペースで停止するまでのルートを進んでいる場合。その時点から、駐車された車両によって駐車スペースがブロックされている場合。
- 長さのせいで車両が複数の隣接するスペースに割り当てられており、それらが占有されているとみなされている場合。車両が、その駐車スペースで停止するまでのルートを進んでいる場合。その時点から、駐車された車両によって駐車スペースがブロックされている場合。
- 以下の理由により、車両がまだ駐車スペースに到達していない場合や、他の車両によって駐車スペースへのアクセスが妨げられている場合でも、駐車スペースは占有されているとみなされ、その車両に割り当てられたままとります。
- 車両が交通渋滞で停止している場合。
- 車両が駐車スペースの隣の車線で渋滞に巻き込まれている場合。
- 駐車スペースのある駐車場リンクにつながるコネクターで渋滞に巻き込まれている場合。
- 経路決定タイプ [Parking lot]-[駐車場] に従って割り当てることができるすべての駐車スペースがまだ占有されているため、駐車スペースが待機車両用に確保されしだい。
駐車場がブロックされている場合の駐車
他の車両が駐車場への進入をブロックしているために車両が駐車できない場合、60秒後に運転状態が [Ignores parking blockage]-[駐車阻害を無視] に変わり、車両はそのまま駐車します。
駐車スペースから離れる
停止時間が過ぎると、元のルートに戻るように車両を誘導するよう自動生成された経路を経由して駐車スペースを離れます。そのために、 Vissim は、駐車場の端から、車両の本来の経路に含まれ、駐車経路決定の下流にあるコネクターの途中までの最短経路探索を行います。その結果から、Vissim は最短経路を選択します。駐車場から出た車両が、このようにして選択済みオリジナル経路のコネクターの半分に到達すると、すぐに復路が完了し、オリジナル経路を追従します。
|
|
注意: Vissimは、駐車場経路決定の下流位置までの最短距離である経路を決定します。車両を駐車場からルートネットワークへ戻すためのルートを生成するために、Vissimは、ルート全体のほか、車両が離れようとしている駐車場の上の車両の現在地も考慮します。このため、車両が元のルートを二度通ったり、その一部をスキップする場合があります。 |

駐車場から出庫する際の駐車方向
駐車場の [Parking direction]-[駐車方向] 属性は、車両が前進で駐車場に入出庫するることができるか、または逆向きで駐車場に入出庫するることができるかを定義します (駐車場の属性)。
- 前進> 前進: 例えば、リンクと平行に複数の駐車スペースがある縦の駐車場や、2つの平行リンクの間にある斜めの駐車場をモデル化し、車両が下流に出ることができるようにするには、駐車方向[Pull forward into and out of parking lot]-[前進で駐車場に入出庫]を使用します。
以下の駐車方向では、斜めの駐車場または1台以上の並列駐車スペースがある垂直の駐車場での駐車が可能です。車両は、駐車した駐車場のリンクの上流方向に再び駐車場を離れる。
- 前進 > 逆向き:前進で駐車場へ入り、逆向きで出る
-
逆向き > 前進: 逆向きで駐車場へ入り、前進で出る
-
駐車方向 [Any > opposite]-[任意の >反対] では、両方のオプションが可能です。車両は、駐車場に前進して入り、逆向きでそこから出るか、逆向きで駐車場に入り、前進してそこから出ることができます。この駐車方向では、前進して駐車場に入出することや、逆向きで駐車場に入出することはできません。
斜めまたは垂直の駐車場をモデル化するには、[Create car park]-[駐車場の作成] 関数を使用してください (ネットワークエディターで駐車場を作成し、属性を定義)。 これにより、複雑な駐車場をわずか数ステップで挿入することができます。この場合、ネットワークエディターで駐車スペースの数を定義すると、自動的に [Create car park]-[駐車場の作成] ウィンドウが開きます。ここでは、関連する属性値を定義します。そして Vissim は必要なネットワークオブジェクトをすべて作成します。[Create car park]-[駐車場の作成] ウィンドウで駐車料金(前進)と駐車料金(逆向き)の属性値を指定すると、 Vissim はすべての方向に必要なネットワークオブジェクトを作成し、車両が駐車場へ前進と逆向きで入ったり、駐車場から前進と逆向きで出たりできるようにします。つまり、後からネットワークオブジェクトを作成しなくても、駐車場の [Parking direction]-[駐車方向] 属性を変更するだけで、車両が駐車・出庫できる方向を指定することができます。
駐車スペースのモデル化に関する要件
駐車場を手動で定義し、これらの前提条件を保証する [Create car park]-[駐車場の作成] 関数を使用しない場合は、以下の前提条件を考慮してください。
- 駐車場のリンクは駐車場の下流で終わっていること。
- 少なくとも1つのコネクターが、メインリンクから駐車場リンクへとつながっていなければならないこと。
- 駐車ルートは、駐車場経路決定からこのコネクターを経由して駐車場へ導かなければならないこと。
車両を駐車場に逆向きで入庫させる場合は、以下のモデリング要件も満たさなければなりません。
- 駐車場リンクへのコネクターは、垂直の駐車場の下流から始めなければならないこと。これは、メインリンクを走る車両は、駐車スペースに逆向きで入庫する前に、まず駐車スペースを通過しなければならないからです。
- このコネクターでは、 [Reverse parking]-[逆向き駐車] 属性を選択しなければならないこと(コネクターの属性)。
- 駐車場では、 [Parking direction]-[駐車方向] 属性の選択値は、逆向き駐車を認めなければならないこと。
逆向き駐車に対する制約
以下の機能および方法は、逆向き駐車をサポートしていません。
- 動的配分
- メソスコピックシミュレーション
- メジャー交通流の定義
- ANMルート
- フローバンドル
-
外部ドライバーモデルと運転シミュレーターインターフェイス
逆向き駐車の制限
- 公共交通車両は逆向き駐車をしません。
- [Reverse parking]-[逆向き駐車] 属性を持つコネクターには、1車線だけが許されます。
- 車両と歩行者の交錯は考慮されていません。
- 評価に関連する結果属性と制限は、それぞれの評価とともに記述されます (評価の概要)。
- 非常に長い車両の駐車操作を表示する場合、重なりやジャンプが発生することがあります。
- メインリンクの交通信号機は、車両が駐車場に逆向きで進入するコネクター方向には整列できません。
車両が逆向きに駐車場から出る場合は、次の項目が適用されます。
- 自動車追従モデルは、Wiedemann 74またはWiedemann 99の場合があること。
- 表示は、前進走行の運転挙動パラメータに基づくこと。これにより、Vissimは、認識した車両の距離と数を判断できます。距離は、車両のリアエッジを始点として計算されます。駐車スペースを逆向きに出る車両は、その経路上にある他の車両を認識すること。接近する車両があれば、両方の車両がブレーキをかけることができます。
- 車両の [DesSpeed]は、駐車場の [Speed (reversing)]-[速度(バック走行)] で指定された [DesSpeed] に基づきます。
- 車両は希望加速度以上に加速しないこと。
- 駐車時間が終了すると、駐車場から出る車両は、最初に到達したコネクターで、希望の方向が [All]-[すべて]であるコネクターに反転し、出発リンクに戻ります。駐車スペースから逆向きで出る車両は、希望する方向が [All]-[すべて]、 [Right]-[右] または [Left]-[左] であるコネクターのみを使用することができ、方向が [None]-[なし]であるコネクターは無視されます。駐車場から逆向きで出る際に車両が使用するコネクターは、駐車の際に車両が使用するコネクターとは異なるものであり、異なるリンクや車線につながる可能性があります。車両は、そのルート上のリンクに到達し、前進を続けることができるようになるまで後退します。後退中に車両がリンクに完全に到達すると、すぐにターンポイントで停止します。駐車場属性 [Direction change duration distribution]-[方向変更持続分布] で定義された待機時間が過ぎると、車両はルート上を前進し続けます (駐車場の属性)。前進するとき、車両は駐車前に有効だったDesSpeedで走行します。
- Vissimは、内部的には、車両が停止する折り返しポイントの位置を計算し、車両が次の時間ステップからそのルートを走り続けることができるようにします。
- 車両の属性 [Direction of travel]-[旅行の方向] は値 [Reverse]-[反対]を持ちます。例えば、 [Vehicles In Network]-[ネットワークの車両] リストにそれを表示することができます。
- 車両の属性 [Driving condition]-[運転状態] は値 [Reversing]-[反転]を持ちます。例えば、 [Vehicles In Network]-[ネットワークの車両] リストにそれを表示することができます。
- 車両は車両経路を追従します。ルートは、車両のフロントエッジを基準ポイントとして使用します。
- 駐車スペースから出る車両は、接近してくる車両から保護されなければなりません。駐車スペースから出る車両は、主要な流れが途切れるのを待ち、駐車車両は駐車スペースから車両が出るまで待ちます。車両が駐車スペースから離れる際に使用するコネクター上の交錯エリアは、保護のためには十分です。これらの交錯エリアには、 [passive]-[受動的] (交錯エリアの使用)というステータスを割り当てなければなりません。駐車スペースから逆向きで出る車両を保護するために、例えば優先ルールや停止標識などのさらなるネットワークオブジェクトは必要ありません。Vissim が駐車スペースから逆向きで出る車両を守るためには、車両には、駐車スペースから後退できるよう、駐車スペースの長さより少なくとも3cm以上広いスペースがなければなりません。車両の保護は、対向車線からの交通を伴う走行路上の車両も考慮に入れています。
- 行き止まりのすぐ近くにある垂直駐車場の駐車スペースには、車両を前進で入庫することができます。しかし、駐車場から出ようとする車両の継続走行ルート上のリンクの近くの車線には、逆向きで出るのに十分なスペースがないかもしれません。この場合、 Vissim は、車両が駐車場を出て近くの車線に到達するためのリンクとコネクターを挿入します。これは、行き止まりの先の逆向き駐車にも適用されます。
|
|
注意: 旧バージョンで作成された Vissim ネットワークを開くために Vissim バージョン2020以降を使用する場合、車両が駐車スペースから逆向きで出るために使用するコネクターで、交錯エリアにステータス [passive]-[受動的] が割り当てられていることを確認してください。これにより、駐車スペースから後退する車両を確保するために定義された他のネットワークオブジェクト(優先ルールや停止標識など)が不要になります。また、シミュレーションでの保護をチェックし、不要なネットワークオブジェクトを削除してください。 |
複数の車線と駐車場のあるリンク上の駐車挙動
車両は、他の駐車車両によって占有またはブロックされていない駐車スペースのみを選択します。
次の場合、利用可能な駐車スペースは、スペースに駐車しているかまたは利用可能なスペースの隣の車線上にいる別の車両によってブロックされています。
- 駐車スペースの左および/または右に対して、駐車場のない車線があり、利用可能な駐車社スペースの隣の該当車線上に車両が駐車されている場合。
- 駐車スペースの左および/または右に対して、駐車場のある車線と駐車場のない別の車線がある場合。利用可能な駐車スペースと駐車場のない車線の間の駐車スペースに車両が駐車されている場合。
- 駐車スペースの左および/または右に対して、駐車場のある車線と駐車場のない別の車線がある場合。互いに隣接する2つの利用可能な駐車スペースが存在するが、その2つのスペースの隣の車線に車両が駐車されている場合。
車両が、[Parking lot]-[駐車場] タイプの車両経路決定のセクションを通過するとすぐに、Vissimは車両のルートと対応する駐車場をチェックします。その後Vissimは、その車のために駐車場を見つけ、そこを占有します。時間ステップごとに、Vissimは、ステータスが [Waiting]-[待機中] でないすべての車両をチェックし、占有された駐車スペースにその時点でアクセスできるかどうかを確認します。その時点で駐車スペースにアクセス可能であり、その駐車スペースが単車線のリンク上にあるか、または駐車スペースにアクセスできなくなっている場合、Vissimはアクセスできる、利用可能な駐車スペースを探します。この駐車スペースは、車両の現在の駐車ルートの下流にある駐車場に配置されている必要があります。
車両に対して選ばれた駐車スペースが、車両が決定ポイントを通過した時点ではまだ利用可能であっても、そこに到着する直前に占有された場合、車両は別の駐車スペースを選択します。前提条件:駐車経路決定のルート上で、さらに下流に利用可能な駐車スペースが存在すること。
車両が決定セクションを通過した後で、誘引性の高い駐車スペースが利用可能となった場合、車両は元々選択していた駐車スペースがまだアクセス可能であれば、そちらに向かって走行します。
利用可能なスペースやアクセス可能なスペースが十分にないため、車両がどの駐車スペースにも駐車できない場合、[Parking lot]-[駐車場] タイプの車両経路決定は無視されます。車両は、元のルート上の走行を続けます。
車両が斜めの駐車スペースから複数の車線があるリンクに出るときは、近い方の車線を選びます。
1車線および1つ以上の占有された駐車スペースでの駐車挙動
複数の駐車スペースが並んでいる車線上で、1つあるいは複数のスペースが占有されているか確保されている場合、車両の運転手は、他の利用可能な駐車スペースの前にある、さらに上流の駐車スペースを選択します。これは、[Attraction]-[誘引性] 属性によってさらに下流の駐車スペースが提示された場合にも適用されます。各時間ステップで、車両の運転手は、より都合のよい駐車スペースが利用可能になっていないかをチェックし、それに応じて目的地を変更します。
車両による駐車スペースの確保と、駐車スペースが空くまでの待機
車両が [Parking lot]-[駐車場] タイプの車両経路決定を通過し、空いている車両スペースがない場合には、属性 [Full occupancy behavior]-[満員時挙動] を設定し、このような場合の車両の挙動を指定することができます (駐車経路決定の属性)。
- 走行を続行する
- 確保できる次の駐車スペースまで走行し、そこで駐車スペースが空くのを待機し、そこに駐車する
駐車スペースを確保するための要件:
- 駐車スペースが占有されており、車両がそこに駐車されていること。
- 駐車スペースが確保されていないこと。
- 駐車スペースの長さが、車両の長さに十分対応できる長さであること。車両が駐車スペースよりも長く、複数の隣接スペースを確保できない場合、車両は走行を続けます。
確保された駐車スペースへ向かう間、車両は別の空いた駐車スペースを探しません。
次の場合、車両は走行を続行します。
- 利用できる空き駐車スペースがない場合。
- 確保できる駐車スペースがない場合。
- すべての駐車スペースが確保されている場合。
- 駐車経路決定に対し、属性 [Full occupancy behavio]-[満員時挙動] で、[Drive On]-[ドライブオン] が選択されている場合。
- 車両に対して十分な長さのある駐車スペースがない場合。
- Vissimは、すべての駐車スペースが占有されていてもそこに駐車されている車両がないと、駐車期間を計算できません。たとえば、交通渋滞に嵌まっている他の車両によってブロックされているせいで、車両が割り当てられた駐車スペースにまだ到着していないか、到着することができない場合などがこれに該当します。
駐車場グループ車を使います。
駐車場グループの評価に含めたい駐車場に [Parking lot groups]-[駐車場グループ] を割り当てることができます(駐車場グループの定義), (リストでの駐車場グループ結果の表示)。
駐車場の評価
評価を使用して、以下のオブジェクトタイプの結果属性を入力し、リストに表示することができます。
- 駐車スペース (リストでの駐車スペース結果の表示)
- 駐車場 (リストの駐車場結果の表示)
- 駐車場グループ (リストでの駐車場グループ結果の表示)
- 駐車場経路決定 (リストでの駐車場経路決定の表示)
この評価では、同じ時間ステップ内で通過する経路決定の影響を考慮します。
[Vehicle record]-[車両記録] の評価では、駐車スペースデータを含む結果属性を選択することもできます (ファイルまたはデータベースへの車両記録の保存)。
車両がCOM経由で Vissim ネットワークから削除され、駐車操作を評価する評価に含まれる場合、 [Number of parked vehicles]-[駐車車両台数] は1減少します。ただし、これは駐車スペースを空けることとはみなされません。
動的配分の車両がCOM経由で Vissim ネットワークに追加されると、 [Number of parked vehicles]-[駐車車両台数] が1増加します。しかし、これは駐車とはみなされません。この車両に経路が割り当てられている場合、その車両は駐車スペースを離れ、その経路をたどります。
評価は、占有駐車スペースを考慮して行われます。
車両の長さによって駐車場の複数の駐車スペースを車両が占有する場合、 Vissim はこの結果を単一の駐車操作として評価に含めます。
縦列駐車スペースのうち、駐車車両の前端と次の下流側の駐車スペースとの間の距離が最小距離の0.5メートル未満である場合、他の車両がこの駐車スペースを使用することができないため、この駐車スペースも車両が占有しているとみなされます。これは、車両の後端と、その車両の駐車スペースの上流に位置する隣接駐車スペースとの間の最小距離にも適用されます。
親見出し:
I編集方法については以下参照:
