駐車場の属性
ネットワークオブジェクトを挿入する際、オブジェクト作成後に [Edit]-[編集] ダイアログが自動的に開くよう設定している場合は、[Parking Lot]-[駐車場] ウィンドウが開きます (オブジェクト作成後の右クリックの挙動と操作)。デフォルトでは、[Parking Lot]-[駐車場] リストのみが開かれます。
このウィンドウには、ネットワークオブジェクトの属性値を入力します。すでに定義済みのネットワークオブジェクトには、次の機能を使用してウィンドウを呼び出すことができます。
- ► ネットワークオブジェクトタイプのネットワークオブジェクトのリストで、目的のネットワークオブジェクトがある行をダブルクリックします。
- ► ネットワークエディタで、目的のネットワークオブジェクトを選択します。次に、そのショートカットメニューから、[Edit]-[編集] をクリックします。
ネットワークオブジェクトには追加属性がある場合があります。ネットワークオブジェクトタイプのネットワークオブジェクトリストでは、すべての属性と属性値を表示できます。次の機能を使用してリストを開くこともできます。
- ► ネットワークオブジェクトサイドバーで、目的のネットワークオブジェクトタイプを右クリックします。次に、ショートカットメニューから、[Show List]-[リストの表示] を選択します (ネットワークオブジェクトサイドバーのショートカットメニュー)。
- ► ネットワークエディタで、目的のネットワークオブジェクトを選択します。次に、ショートカットメニューから、[Show In List]-[リスト内に表示] をクリックします (ネットワークエディタでネットワークオブジェクトを選択してリストに表示)。
- ► [Lists]-[リスト] メニューの目的のカテゴリ内のネットワークオブジェクトタイプをクリックします。
ネットワークオブジェクトタイプのネットワークオブジェクトリストでは、ネットワークオブジェクトの属性と属性値を編集できます (リストのセルの選択)、(リストの使用)。
このオブジェクトタイプのオブジェクトは他のオブジェクトとの関係を持つことがあります。 これが、属性リストが結合リストの一部として表示される(左側に)理由です 。[Lists]-[リスト] ツールバーの [Relations]-[関係] ボックスでは、目的の関係の属性が右側に表示された結合リストを表示したり、編集したりできます(以下の「関係としての依存型オブジェクトの表示と編集」を参照)および (結合リストの使用)。

|
注意: リストでは、 |

駐車場の基本的な属性
ネットワークエレメントの基本的な属性は、ウィンドウの上部と、特定のネットワークオブジェクトタイプのネットワークオブジェクトのリスト内に表示されます。
1. 必要な変更を加えます。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
| [No]-[番号] |
固有番号 |
| [Name]-[名前] |
名称 |
| [At]-[位置] |
[Position]-[位置](Pos):リンクまたはコネクターの開始地点からの距離 |
| [Length]-[長さ] |
駐車場の長さ、最低1m |
| [Type]-[タイプ] |
|
| [Showing label]-{ラベルの表示] |
|
|
[Evaluation groups]-[評価グループ] |
|
 このオプションが選択されていない場合は、すべての駐車場のラベルが選択されているときでも、駐車場のラベルは表示されません。駐車場のラベルには次の項目が利用できます。
このオプションが選択されていない場合は、すべての駐車場のラベルが選択されているときでも、駐車場のラベルは表示されません。駐車場のラベルには次の項目が利用できます。 このオプションを選択すると、この駐車場グループの駐車場が駐車場グループの評価に含まれます
このオプションを選択すると、この駐車場グループの駐車場が駐車場グループの評価に含まれますDyn.[Assignment]-[割り当て] タブ
これらの属性は、動的配分の駐車場にのみ関連します (動的配分の駐車場の定義)。
[Parking Spaces]-[駐車スペース] タブ
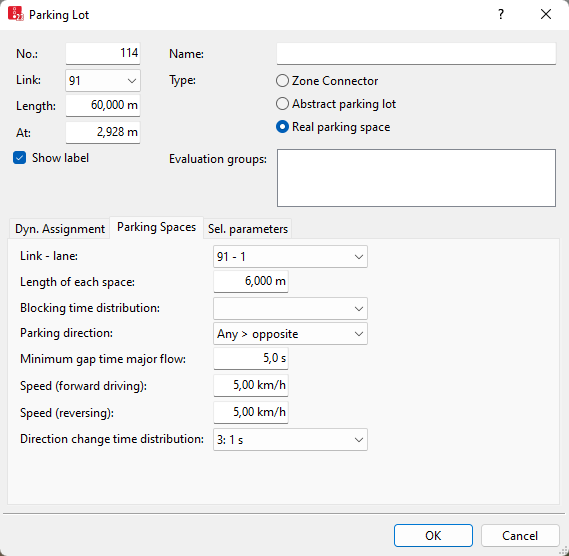
これらの属性は、[Real parking spaces]-[実際の駐車スペース] にのみ関連します。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[Link - lane]-[リンク - 車線] |
駐車場が配置されるリンクおよび車線(Ln)の番号 |
|
[Length per space]-[空間あたり長さ] |
駐車スペースあたりの長さ(LenPerSpc)。空間あたりの最大の長さが駐車場の長さを超えないようにしてください。全長が、駐車場の長さの倍数になっていない場合、残りの長さは駐車場の最後に追加されますが、いずれの車両にも利用されません。 |
|
[Blocking time distribution]-[ブロックした時間分布] |
([BlockTmDistr]-[ブロックする時間分布]。オプション。多車線リンクの平行駐車中に、車両が反対車線の駐車スペースに最終的に停止するまでに車線をブロックする時間。ブロック時間は、駐車スペースに前進してきた車両が、まず車両の後部が駐車スペースから並列車線に出て停止したときに始まり、車両が最終的に並列駐車位置に停止したときに終了します。斜め駐車や垂直駐車の場合は関係ありません。
[0: None]-[0:なし]:ブロックした時間はシミュレーションで考慮されません。 |
|
[Parking direction]-[駐車方向] |
[ParkDir]-[駐車方向]:リアルパーキングスペースのみ。車両が駐車し、駐車スペースから出る方向。 [Any > opposite]-[任意>反対] の場合、以下が適用されます。垂直または斜めの駐車場に、車両を前進または後退させて逆向きに入れることができます。 動的配分で[Forward > reverse]-[前向き > 逆向き] が選択され、ゾーンが駐車場に割り当てられている場合、以下が適用されます。
|
|
[Minimum gap time major flow]-[最小ギャップ時間・主交通流] |
[MinGapTmMajFl]-[最小ギャップ時間-主交通流]:車両が駐車スペースを離れるまでのメジャー交通量の2台の車両間の最短ギャップ時間 |
|
[Speed (reversing)]-[反転速度] |
[SpeedRvs]-[反転速度]: 駐車スペースにバックで入出する車両の希望速度。デフォルト値は5 km/h、値の範囲は0.001~9999 km/h。この値は、交通流に大きな影響を与える可能性があります。 |
|
速度(前進時) |
[SpeedForw]-[前進速度]:駐車スペースに前向きで入出する際の車両の希望速度。デフォルト値は5 km/h、値の範囲は0.001~9999 km/h。この値は、交通流に大きな影響を与える可能性があります。 |
|
[Direction change duration distribution]-[方向変更持続分布] |
[DirChgDurDist]-[方向変更期間分布] : 属性駐車方向 [Forward > reverse]-[前向き > 逆向き] が選択されている場合にのみ関連します。駐車操作中に走行方向を変えたときの停止時間の時間分布。デフォルト:時間分布5 秒 (時間分布の使用)。値が指定されていない場合、車両は時間ステップの間停止したままとります。この値は、交通流に大きな影響を与える可能性があります。 |
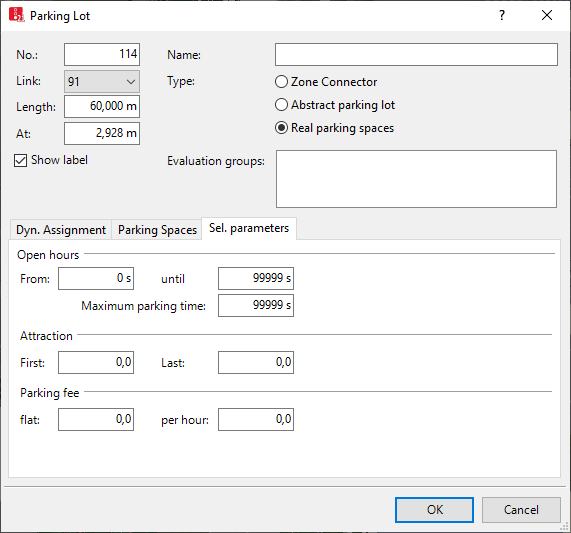
[Sel. parameters]-[パラメータ選択] タブ
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
| [Open hours]-[営業時間] |
[From]-[開始](OpenFrom)、[to]-[終了](OpenUntil):車両が駐車場に入ることができる時間範囲。これらの時間外に車両が駐車場に進入することはできません。 |
| [Maximum parking time]-[最大駐車時間] |
ParkTmMax:
|
| [Attraction]-[誘引性] |
Attrac:この値が大きければ大きいほど、その駐車場または駐車スペースの誘引性が高くなります。これにより、属性として明示的に利用できない駐車場の特徴を考慮することができます。[Real parking spaces]-[実際の駐車スペース] の場合、[First]-[最初] と [Last]-[最後] に違う値を入力することで、駐車スペースの誘引性の線的変化を作成することができます。駐車場の中央または端に魅力的な駐車スペースを持つ駐車場を定義するには、[Attraction]-[アトラクション]の値を鏡面反転させた[Real parking spaces]-[リアルパーキングスペース]タイプの対称的な駐車スペースを2つ追加します。 |
| [Parking Cost]-[駐車コスト] |
ParkFee:[Zone Connector]-[ゾーンコネクター] および [Abstract parking lot]-[抽象的駐車場]の場合にのみ関連します。
|
このネットワークオブジェクトは、[Attributes]-[[属性] リストにある追加の属性を持ちます。たとえば、次のような属性がこれに該当します。
| [Short name]-[短縮名] | [Description]-[説明] |
|---|---|
|
CurrentOccup |
[Currenty occupancy]-[現在の占有率]: [Parked]-[駐車] 状態の車両がある駐車スペースの数。駐車場に対して[Zone connector]-[ゾーンコネクター] タイプが選択されている場合、値は含まれません。駐車場のタイプで [Abstract parking lot]-[アブストラクト駐車場]が選択されている場合の、駐車車両数。 |
|
CurReserv |
[Current reservations]-[現在の予約状況]:駐車スペースに向かう車両にすでに割り当てられている空き駐車スペースの数。これらの車両の駐車状態は[Driving to parking space]-[駐車スペースへ走行]になります。車両の長さが複数の駐車スペースの予約を必要とする場合、これが値に含まれます。 |
|
CurOverbook |
[Current overbookings]-[現在のオーバーブッキング]: 車両が空きを待っている使用中の駐車スペースの数 |
|
CurAvail |
[Current availability]-[現在の可用性]: 使用も予約もされていない駐車スペースの数 |
|
DetBlock |
[Detect blockage]-[障害物検出]:リアルパーキングスペースのみ。
デフォルトではこのオプションが選択されています。 |
|
[Zone]-[ゾーン] |
ODマトリックスのゾーン番号を駐車場に割り当てる。1つのゾーンに複数の駐車場が属する場合があります。 |
関係としての依存型オブジェクトの表示と編集
このネットワークオブジェクトタイプの属性と属性値が左側のリストに表示されます。これは、2つの結合リストで構成されています。
1. 左側のリストで、目的のエントリーをクリックします。
右側のリストには、左側のリストで選択されたネットワークオブジェクトに割り当てられたネットワークオブジェクトやベースデータの属性と属性値が示されます (結合リストの使用)。
- 評価グループ: 駐車場グループの評価に使用され、駐車場が割り当てられる駐車場グループ。
- 速度分布の動的配分(動的配分の駐車場の定義)
- 車両(パーキング): 現在駐車場に駐車している車両の属性
- 駐車スペース: 駐車場の駐車スペースの数と、駐車スペースが位置する駐車場の数。
- 経路: 動的配分による経路ファイルの経路。経路が表示されず、動的配分を実行した場合、その経路ファイルを使用して経路を読み込むことができます。そのためには、リストのショートカットメニューで、それぞれのコマンドをクリックしてください (経路の属性)。
2. リストツールバーの [Relations]-[関係] リストで、目的のエントリーをクリックします。
3. 目的のデータを入力します。
データが割り振られます。
