運転挙動のパラメータ [driver error]-[ドライバーエラー] の編集
シミュレーションでは、さまざまなドライバーエラーを考慮することができます:
- ドライバーの一時的な注意力散漫とは、先行車に対応しなくなることを意味します ([Temporary lack of attention during following]-[追従の際の一時的な注意力散漫])。
- ドライバーの一時的な注意力散漫は、車両の横方向の位置がずれる原因になります (ドライバーの注意散漫による運転ミスの定義)。
- 他車の速度を一時的に見誤ることは、主要な流れの隙間の計算やさまざまな交錯状況に影響します (一時的に他の車両の速度を見誤ります。)。
- 車両が認識する相互作用オブジェクト数を減らせば、交差点での注意力低下をシミュレートできます。そのためには、交錯エリアが相互作用の対象として認識されるように設定します ([Modeling loss of attention at intersections]-[交差点での注意散漫のモデル化])。
- カーブで車両がクリティカル速度を超えると、アンダーステアや横方向のドリフトを引き起こす可能性があります。このドライバーエラーについては、運転挙動に加えて、ドリフト速度、クリティカル速度、リンクの関連ポイントでの半径を定義します (横方向漂流速度の使用)、 ([curve speed]-[カーブ速度]の定義), (リンクの属性)。
1. [Base Data]-[ベースデータ] メニューから、[Driving Behaviors]-[運転挙動] をクリックします。
[Driving Behaviors]-[運転挙動] リストが開きます。一部の運転挙動のパラメータセットは事前に定義しておくことができます。
デフォルトでは、リストを編集できます (リストの使用)。

|
注意: リストでは、 |

2. 選択するエントリーを右クリックします。
3. ショートカットメニューで、[Edit]-[編集] をクリックします。
[Driving Behavior]-[運転挙動] ウィンドウが開きます。
4. [Driver Errors]-[ドライバーエラー] タブを選択します。
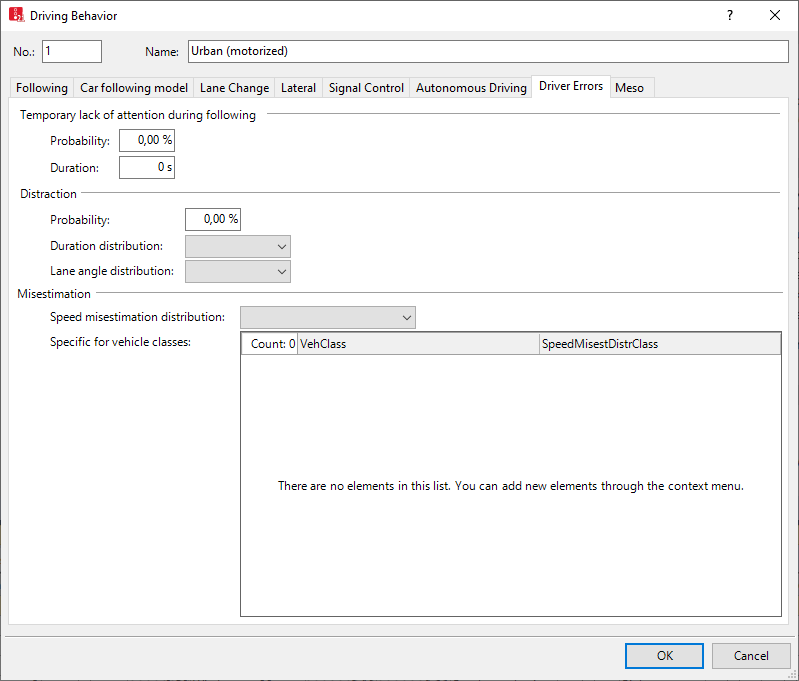
5. 目的のドライバーエラーの属性の編集:
[Temporary lack of attention during following]-[追従の際の一時的な注意力散漫]
シミュレーションでは、ドライバーは先行車の急ブレーキにしか一時的に反応しないことを考慮できます。値を大きくすると、影響を受けるリンクの容量が減少します。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[Probability]-[確率] |
[Temporary lack of attention - sleep probability]-[一時的注意力散漫 - 居眠り確率]: 注意力散漫の頻度 |
|
[Duration]-[期間] |
[Temporary lack of attention - sleep duration]-[一時的注意力散漫 - 居眠り時間] (SleepDur): 先行車に対して車両が反応しない期間。ただし、緊急ブレーキには反応します。 |
ドライバーの注意散漫による運転ミスの定義
シミュレーションでは、車のドライバーが一時的に注意散漫になり、そのために車が横方向に逸脱することを考慮に入れることができます。運転挙動の以下の属性を編集できます:
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[Probability]-[確率] |
[Distraction probability]-[注意散漫確率] (DistractProb): シミュレーションの1秒間に車両が不意に横方向の位置を変える確率。[Distraction duration distribution]-[散漫持続期間分布]と[Distraction lane angle distribution]-[散漫車線変更分布]の属性に影響を与えます。その後、車両は希望の横位置に戻ります。値の範囲は0~100 |
|
[Duration distribution]-[期間分布] |
[Distraction duration distribution]-[散漫持続時間期間分布] (DistractDurDistr): 値[Distraction lane angle distribution]-[散漫車線変更分布]に基づいて車両の車線角度が変化する期間の分布 (時間分布の使用) |
|
[Lane angle distribution]-[車線角度の分布] |
[Distraction lane angle distribution]-[散漫車線変更分布] (DistractLnAngleDistr): 車線の中央に対して車両が逸脱する角度の分布 (一般的な分布の使用)。値の範囲 (ラジアン): 0 rad ~ 1.5 rad。 |
3つの属性が選択され、運転挙動が車両に影響を与えると、車両は以下の条件で注意散漫状態に変化します:
- 運転挙動については、[Distraction probability]-[注意散漫の確率]は > 0 に設定されている。
- [Duration distribution]-[持続時間分布] が指定されている。
- [Lane angle distribution]-[車線角度の分布] が指定されている。
このような場合、Vissimは各時間ステップで0から100の間の乱数を引きます。この乱数が以下の場合
[Distraction probability]-[注意散漫の確率] ÷ [Simulation resolution]-[シミュレーション解像度] 時間ステップ(秒)/シミュレーション秒
Vissim は[Lane angle distribution]-[車線角度の分布]からランダムな値Alphaを、また[Duration distribution]-[継続時間分布]からランダムな値tを引きます。 次のtシュミレーション秒間は、車両は車線中心に対してAlpha角で横移動します。また、リンク上のすべての車両や路肩から独立して動きます。Vissim は偏差の方向(右か左か)をランダムに決定します。時間 tの後, 車両は自動的に設定された [Desired position at free flow]-[自由交通流での希望位置]に戻ります (運転挙動のパラメータ [Lateral behavior]-[横方向の挙動] の編集)。車両がこの位置に達するまで、新しい注意散漫を開始することはできません。
注意力散漫にある間は、以下が適用されます:
- 車両の加速度が一定になる。
- 車両は、信号機、優先ルール、交錯エリア、停止標識など、他の車両やネットワークオブジェクトをすべて無視する。
- 隣接車線を走行する車両の横方向の挙動について、[Observe adjacent lanes]-[隣接する車線を観察]が選択されていない場合、これらの車両は、注意力散漫車両の横方向の逸脱を完全に無視します。これはまだ車線に残っているかのように扱われます。
属性[Lateral deviation (distraction)]-[横方向逸脱(注意散漫)]は、現在の時間ステップにおける横方向逸脱を示します (リスト内のネットワークにおける車両の表示)。
一時的に他の車両の速度を見誤ります。
シミュレーションでは、ドライバーが一時的に他の車の速度を見誤ることを考慮することができます。速度誤算の分布属性は、例えば、優先ルールや交錯エリアでの時間ギャップの計算や、対向車線での追い越しのための車線変更時に有効です。
1. 以下の特性を持つ経験的自由分布が少なくとも1つ定義されていることを確認する (一般的な分布の使用):
| [Attribute]-[属性] | [Description]-[説明] |
|---|---|
| x |
係数に他の車両の現在の速度を乗じたもの。この係数の変位は、どの車両でも、ネットワークにいる間は一定です。つまり、常に速度を過大評価する車両と、常に速度を過小評価する車両があるということです。 係数xが1に等しくない車両は、さらに交錯エリアでの他車両の現在および将来の加速度を無視し、現在の速度に係数xを掛けた値に基づいてのみ、将来の旅行経路を推定します。 |
| y |
xまでのすべての値の累積確率。 速度誤算の影響を受けた車両は、シミュレーション実行中に他の車両の速度を過小評価または過大評価します。シミュレーションの実行中、車両が他の車両の速度を過大評価したり過小評価したりすることはありません。 |
2. [Misestimation]-[誤算]セクションの[Speed misestimate distribution]-[誤算による速度分布]属性で、運転挙動車両のデフォルトとして使用する自由分布を選択します:
| [Long name]-[正式名] | [Short name]-[短縮名] | [Description]-[説明] |
|---|---|---|
|
[Speed misestimate distribution]-[見誤った速度分布] (デフォルト) |
SpeedMisestDistrクラス |
他車両の速度の誤判定の程度の確率分布。戻り値 >= 0。 |
分配は以下のような交錯状況においてのみ有効です:
- 車両対車両の影響がある交錯エリア。Vissim はギャップを再計算します。車両の選択された一般的な分布の値xが1に等しくない場合、車両は他の車両の現在および将来の加速および減速を無視します。車両が考慮するのは、車両の現在速度とxエレメントを掛け合わせた結果だけです。
- 優先ルール: 車両は、交錯マーカーでの旅行と時間のギャップが十分に大きいかどうかを評価します。他の車両の速度に、[Speed misestimate distribution]-[誤算による速度分布]の係数を掛けます。その後、車両は状況を再評価し、優先ルールに対応します。車両は後退する車両の速度を見誤ることはできません。車両が後退する際、上流から接近してくる車両の速度を見誤ることがあります。
- 対向車線での追い越し: Vissim は対向車の現在速度を使用します。対向車が見えない場合は、リンクに定義された[Assumed speed of oncoming traffic]-[対向車想定速度]属性の値が使用されます。
- [Lane changes]-[車線変更]
3. 異なる[Speed misestimate distribution]-[誤算による速度分布]が適用されるすべての車両カテゴリーについて、以下のステップを実施します:
4. [Exception for vehicle classes]-[車両クラスの例外]リストを右クリックします。
5. ショートカットメニューで、[Add]-[追加] をクリックします。
6. [Vehicle class]-[車両クラス]と、それに適用する希望の[Speed misestimate distribution]-[誤誤算による速度分布]を選択します。
7. [OK] で確定します。
車両の運転挙動に、観測された車両の車両タイプが属する車両クラスの特定の分布が含まれている場合、その分布が使用され、そうでない場合は、デフォルトの分布が指定されていれば、それが使用されます。
[Modeling loss of attention at intersections]-[交差点での注意散漫のモデル化]
車両に交錯エリアを相互作用オブジェクトとして認識させることができます。車両が知覚できる相互作用オブジェクト数は限られているため、車両が知覚できる他の相互作用オブジェクト数は減ります(運転挙動のパラメータ [Following]-[交通流] 挙動の編集)。
- ► [Driving behavior]-[運転挙動]リストに以下の列が表示されていることを確認します:
| [Element]-[エレメント] | [Description]-[説明] | |
|---|---|---|
|
ConflArAsInteractObj |
[Conflict areas count as interaction objects]-[交錯エリア-相互作用オブジェとしてカウント]: |
|
 このオプションが選択されている場合、車両は交錯エリアに近づくと、そのエリアを相互作用オブジェクトとみなします。
このオプションが選択されている場合、車両は交錯エリアに近づくと、そのエリアを相互作用オブジェクトとみなします。親見出し:
