運転挙動のパラメータ [Following]-[交通流] 挙動の編集
1. [Base Data]-[ベースデータ] メニューから、[Driving Behaviors]-[運転挙動] をクリックします。
[Driving Behaviors]-[運転挙動] リストが開きます。一部の運転挙動のパラメータセットは事前に定義しておくことができます。
デフォルトでは、リストを編集できます (リストの使用)。
次の手順を使用すれば、リストやタブにある車線変更、横方向挙動、追従挙動のすべての運転挙動のパラメータを変更できます。

|
注意: リストでは、 |

2. 選択するエントリーを右クリックします。
3. ショートカットメニューで、[Edit]-[編集] をクリックします。
[Driving Behavior]-[運転挙動] ウィンドウが開きます。
4. [Following]-[交通流] タブを選択します。
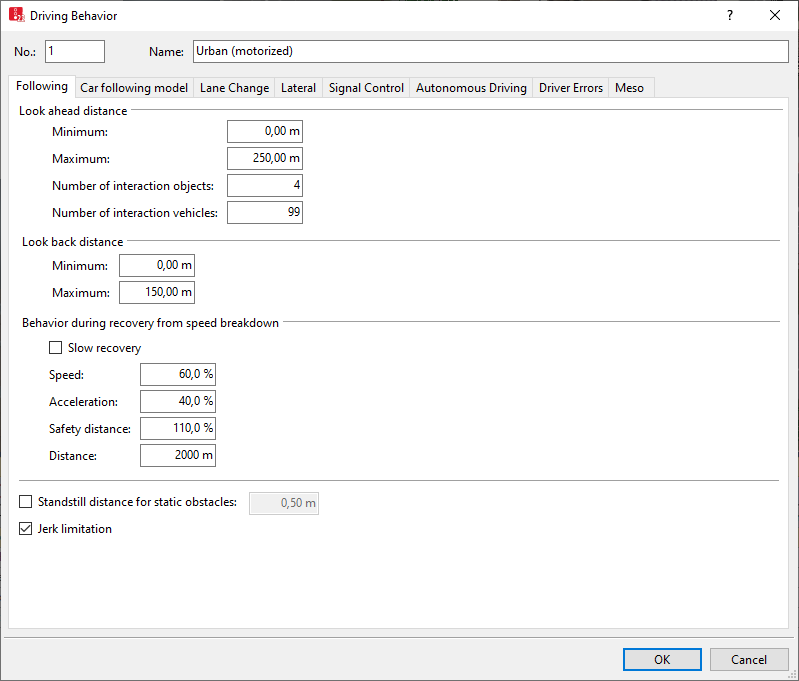
5. 目的のデータを入力します。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[Look ahead distance]-[追越時の前方視認距離] |
[Minimum]-[最小], [Maximum]-[最大]: 車両がルートや経路の下流にある他の車両や相互作用オブジェクトに反応するために確認できる、先行車両までの最小距離と最大距離。車両は、入力された相互作用オブジェクト数に加え、前方の距離を考慮します。 [Look ahead distance]-[前方視認距離]は、静止した障害物に接近する際の車両の動きにも影響します。その後車両は均等に減速します。 [Minimum look-ahead distance]-[最小前方距離の確認] は、車両の横方向の挙動をモデリングする際に重要です。
たとえば閉塞信号を使用して鉄道による交通をモデリングするには、[Maximum look-ahead distance]-[最大前方距離の確認] のみを拡張する必要があります (鉄道のブロック信号のモデリング)。 |
|
[Number of interaction objects]-[相互作用オブジェクト数] |
先行車両の数および/または以下にリストされているネットワークオブジェクト数(車両がルートまたは経路に沿って認識したもの)。入力した観察車両の数以外にも、車両は最短および最長の [look-ahead distance]-[前方距離の確認] を考慮に入れます。 Vissimでは、以下のネットワークオブジェクトが車両としてモデル化されています。車両はこれらのネットワークオブジェクトを前の車両として扱います。これらのネットワークオブジェクトは、赤色の信号機と同様の働きをします。これらのネットワークオブジェクトが非常に短い距離内に複数ある場合は、[Number of interaction objects]-[相互作用オブジェクト数]に大きな数値を入力してください。ただし、その場合、シミュレーションの計算がやや長くなる場合があります。
また、その場で停止しなければならない場合は、車両は次のネットワークオブジェクトも前の車両として扱います。
交錯エリアでの挙動: 車両は、[interaction objects]-[相互作用オブジェクト数]で指定された最も遠い相互作用オブジェクトまで、下流のすべての交錯エリアを考慮します。交錯エリアを[Number of interaction objects]-[相互作用オブジェクト数]に組み入れるには、該当する運転挙動について、属性オプションの[Conflict areas count as interaction objects]-[交錯エリアを相互作用オブジェクトとしてカウント]を選択してください (運転挙動のパラメータ [driver error]-[ドライバーエラー] の編集)。 定義済みの運転動作のための[Number of interaction objects]-[相互作用オブジェクト数]のデフォルト値:
[Number of interaction objects]-[相互作用オブジェクト数]の属性[Number of interaction vehicles]-[相互作用車両数]で、Vissimが上記のネットワークオブジェクトに加えて考慮する車両の数を指定することができます。車両は[Number of interaction objects]-[相互作用オブジェクト数]を最大限に認識します。 |
|
[Number of interaction vehicles]-[相互作用車両台数] |
先行車両に反応するうえで、車両がルートまたは経路に沿って認識した先行車両の数。
すべての定義済み運転挙動のデフォルト値: 99台 例えば、先行車によってセンサーが遮られ、他の車両を検知できない自律走行車をモデル化する場合は、[Number of interaction vehicles]-[相互作用車両台数]を1に設定します。 |
|
[Look back distance]-[後方距離の確認] |
[Minimum]-[最小]、[Maximum]-[最大]: [Look back distance]-[後方視認距離]は、車両が他の上流車両に反応するうえで、その車両の後方を確認できる車両までの最小距離と最大距離を定義します。[Look back distance]-[後方視認距離]では、車両が他の車両を認識するのに影響するだけで、他の相互作用オブジェクトを認識することはありません。 [Look back distance]-[後方視認距離]にある[Number of interaction objects]-[相互作用オブジェクト数]は、車両の横方向の挙動を計算するときにのみ考慮されます。それ以外の場合、車両が後方を確認したとき、最大1台の他の車両を認識します。 横方向挙動: 最小後方視認距離の影響: 車線内で複数の車両が追い越しできる場合は、この値を0.00より大きくする必要があります。たとえば、都市部では20~30mであり、それに応じて他の場所の値よりも大きくなります。こうすることで、同じルート上で[Number of interaction objects]-[相互作用オブジェクト数]属性で指定された台数以上の車両が停止線で止まろうとした場合に、車両が整然と走行するようになります。これは、特に自転車に適用されます。 短い距離に多くのコネクターがあるような目の細かいネットワークでは、最長後方距離は短くすることができます。このような場合、シミュレーション速度にプラスの影響を与えることがあります。 |
|
[Standstill distance for static obstacles]-[静的障害物の静止距離] |
上流車両の静的障害物 (ax) の静止距離。例えば、信号機、停止標識、バス停留所、優先規則、衝突エリアなど。駐車場の停止標識には有効ではありません。 最小値:0.01 m、最大値:10 m、デフォルト値:0.5 m。属性値が0の*.inpxファイルを開くと、値は0.01 mに変更されます。 また、この停止距離を使用して、ホームのスクリーンドアやプラットホームの固定位置に待ち行列がある停留所での公共交通機関の車両の停止位置を定義することもできます。公共交通車両は、その前端が[standstill distance (ax)+ 1 m]-[停止距離(ax)+1m]の位置で停止します。この1メーターによって、公共交通車両は停留所から必ず出ることができます。乗り降りを可能にするためには、停留所の長さは、少なくとも[length of the public transport vehicle + standstill distance (ax)+ 1 m]-[公共交通機関の車両の長さ+停止距離(ax)+1m]に等しくなければならない。 車両は信号機の前で[standstill distance (ax)+ 0.5 m]-[停止距離(ax)+0.5m]で停止します。 |
|
[Jerk limitation]-[ジャークの制限] |
JerkLimit:
以下の状況では、[Jerk limitation]-[ジャークの制限]オプションが選択されても、ジャーク制限は発生しません:
|
 このオプションが選択された場合、車両の加速度は2つの時間ステップの間に制限されます。
このオプションが選択された場合、車両の加速度は2つの時間ステップの間に制限されます。 オプションが選択されていない場合、車両の加速度は2つの時間ステップ間で任意に変化します。例えば、停止状態から加速する車両は、所望の加速度を達成することができます。
オプションが選択されていない場合、車両の加速度は2つの時間ステップ間で任意に変化します。例えば、停止状態から加速する車両は、所望の加速度を達成することができます。[Driving behavior]-[運転挙動]リストでは、追加の属性を選択できます。例を次に示します。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[Increased Acceleration]-[増加した加速度] |
IncrsAccel: 加速する先行車に追従して加速度を上げることができます。デフォルト値 100 %、値域 100 % ~ 999 %。 デフォルト値100%では、先行車が加速すると車間距離は引き離されます。先行車の加速が止んだ後、初めて後続車が接近します。 この値が100 %を超えると、先行車が加速したときに車両も加速し、スムーズな加速が可能になります。 [Increased Acceleration]-[増加した加速度]は、Wiedemann 74およびWiedemann 99に続くモデルに影響します。 [Increased Acceleration]-[増加した加速度]は、以下のタイプの加速度に影響を与えます:
Wiedemann 99 車追従モデルでは、erk の制限があります: 車両が相互作用状態[Free]-[自由]にある場合、車両の最初の時間ステップでは、モデルパラメータCC7 [Oscillation acceleration]-[振動加速度]を介して加速度が制限されます。[Increased Acceleration]-[増加した加速度]に100%超が選択され、車間距離dx>安全距離dsxであり、先行車が加速している場合、ジャーク制限は行われません。 |
