運転挙動のパラメータ [Lateral behavior]-[横方向の挙動] の編集
Vissimでは、デフォルトで車両が車線の全幅を使用します。運転挙動とパラメータ横方向の挙動では、横方向を指定しなくても、車両が車線の左、右、中央を通行できるかどうかを定義できます。車線の幅が十分にあり、[Default behavior when overtaking vehicles on the same lane or on adjacent lanes]-[同じ車線または隣接車線の車両を追い越す際のデフォルトの挙動] セクションの属性で同じ車線での追い越しが許可されている場合は、単一車線での追い越しも可能になります。最大減速によって追い越し車両がタイミングよくブレーキを行うことができない場合は、運転挙動のパラメータ [Consider next turn]-[次のターンを考慮します] と [Minimum lateral distance]-[最小水平距離] によって許可されていない場合であっても、可能であれば、その車両は他の車両を追い越します。したがって、不適切な追い越しが衝突より優先することになります。
さらに、これらの設定は、オプションの[Observe adjacent lane(s)]-[隣接車線を観察]が選択されているときに使用されます。
1. [Base Data]-[ベースデータ] メニューから、[Driving Behaviors]-[運転挙動] をクリックします。
[Driving Behaviors]-[運転挙動] リストが開きます。一部の運転挙動のパラメータセットは事前に定義しておくことができます。
次の手順を使用すれば、リストやタブにある車線変更、横方向挙動、追従挙動のすべての運転挙動のパラメータを変更できます。

|
注意: リストでは、 |

デフォルトでは、リストを編集できます (リストの使用)。
2. 選択するエントリーを右クリックします。
3. ショートカットメニューで、[Edit]-[編集] をクリックします。
[Driving Behavior]-[運転挙動] ウィンドウが開きます。
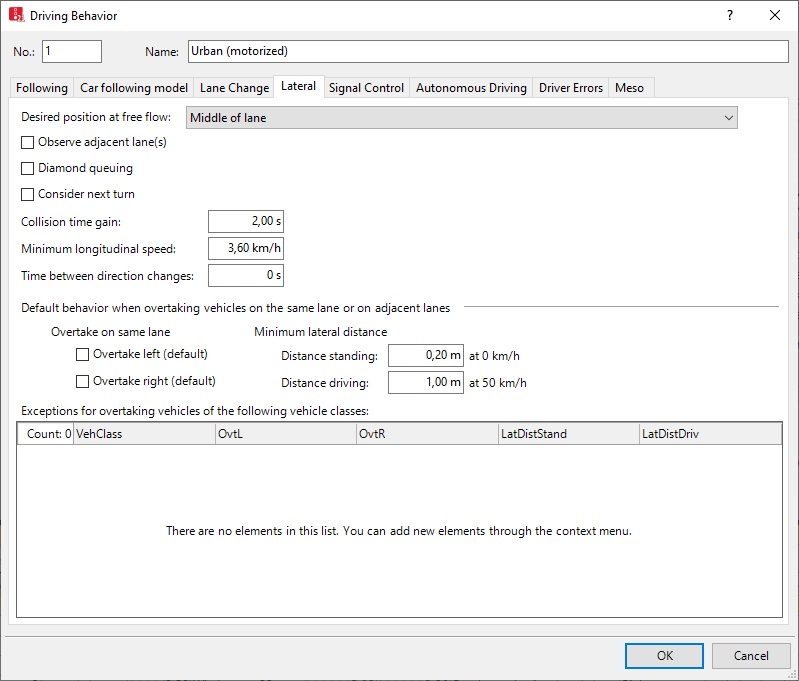
4. [Lateral]-[横方向] タブを選択します。
5. 必要な変更を加えます。
| [Element]-[エレメント] | [Description]-[説明] | ||
|---|---|---|---|
|
[Desired position at free flow]-[自由交通流での希望位置] |
自由交通流での希望位置(DesLatPos):自由交通流におけるその車線内の車両の横方向 [network settings]-[ネットワーク設定]で[traffic rules]-[交通ルール]を変更すると、Vissimによって、属性値[Right]-[右]は[Left]-[左]に、[Left]-[左]は[Right]-[右]に変更されます (車両挙動のネットワーク設定の選択)。 |
||
|
[Observe adjacent lanes]-[隣接する車線を観察] |
ObsAdjLns:
|
||
|
[Diamond queuing]-[ひし形の列形成] |
DiamQueu: |
||
|
[Consider next turning direction]-[次のターン方向を考慮します] |
ConsNextTurn: 車線のない道路の交通の場合、次のように他の車両を考慮した横方向の挙動を可能にします: オプション [Consider next turn]-[次のターンを考慮します] でも、車両の経路の次のコネクターの属性 [Desired Direction]-[希望の方向] が考慮されます (コネクターの属性)。たとえば、この属性に [left]-[左] を選ぶと、遅くとも別の車両が同じコネクターで曲がる際に、車両は右側の車両のみを追い越します。 以下の条件を満たすと車両が点滅:
|
||
|
[Collision time gain]-[衝突時間ゲイン] |
[Minimum collision time gain]-[最短衝突時間ゲイン](MinKCollTimeGain):次の車両または信号機の衝突時間ゲインの最小値。車線での横方向の位置の変更が意味を持ち、実行されるために必要となる時間。衝突時間は車両の希望速度に基づいて計算されます。衝突時間ゲインのデフォルト値は2秒です。値を小さくすると、車両はわずかな改善のために横方向へ回避する必要もあるため、横方向の挙動が急激なものとなります。デフォルトは2.0 s |
||
|
[Minimum longitudinal speed]-[縦方向の最小速度] |
横方向動きに対する最小縦方向速度(MinSpeedForLat):横方向の移動が可能な縦方向最小速度。デフォルト値の1 km/hでは、車両がほとんど止まりそうになった場合でも、横方向に移動できます。 |
||
|
[Time between direction changes]-[方向転換間の時間] |
[Lateral direction change - minimum time (Lateral behavior)]-[横方向変化 - 最小時間(横方向挙動)](LatDirChgMinTm):デフォルト値は0.0 s:ある方向への横方向移動の開始から、逆方向への横方向移動の開始までに経過しなければならない最小シミュレーション時間を定義します。この値が大きいほど、車両の横方向の動きは小さくなります。これらの横方向移動は、同一車線での追い越しが許可されている場合にのみ発生します。車線変更の横方向移動はこの属性の影響を受けません。 |
||
|
同一車線または隣接する車線で車両を追い越す際のデフォルトの挙動 |
この設定は、[Exceptions for overtaking vehicles of the following vehicle classes]-[次の車両クラスの追い越し車両の例外] の一覧にある車両クラスを除き、すべての車両クラスに適用されます。
最小横距離には確率値zが掛けられます:
|
||
|
次の車両クラスの車両の追い越しの例外 |
同一車線または隣の車線の車両を追い越すときのデフォルト挙動から逸脱している、特定の車両クラスの挙動。車線境界線のない交通をモデリングする際に、車線内でこの運転挙動セットの車両によって追い越される可能性がある車両クラスを選択できます。 1. リスト内を右クリックします。 2. ショートカットメニューで、[Add]-[追加] をクリックします。 デフォルトデータが入った新しい行が挿入されます。 3. 必要な変更を加えます。
|
 このオプションが選択されている場合、車両は隣接車線を走る他の車両の位置と横方向の向きを考慮し、
このオプションが選択されている場合、車両は隣接車線を走る他の車両の位置と横方向の向きを考慮し、 このオプションが選択されていないと、車線変更をする場合を除いて、車線よりも幅が長い場合であっても、隣接する車線の車両は無視されます。
このオプションが選択されていないと、車線変更をする場合を除いて、車線よりも幅が長い場合であっても、隣接する車線の車両は無視されます。