目的地駐車場選択の定義
出発地-目的地マトリックスにおける交通需要は、出発地および目的地のゾーンを参照します。ゾーンは、Vissim内で1つ以上の駐車場を介して表されます。運転手の目的地ゾーン内に複数の駐車場が存在する場合、運転手は自身の経路を選択する前に目的地の駐車場を選択する必要があります。
これにより、目的地の駐車場選択は、問題クラスの離散選択の追加の例となります (静的配分と動的配分の違い)。これは、代替手段(ユーティリティ関数および決定関数)が多数存在するためです (動的配分計算のベース)(経路とコストの計算)。運転手によって使用される車両タイプの場合、駐車場検索をトリガーする3つの意志決定状況のそれぞれに対するユーティリティ関数の係数を入力できます (駐車場のユーティリティー関数の係数入力)。ユーティリティ関数の計算は、駐車場の属性 [Parking fee]-[駐車料金] および [Attraction]-[魅力度] にも基づきます (駐車場の属性)。
目的地の駐車場選択には、ロジット式が使用されます (経路検索の使用/非使用の経路選択の方法)。ロジット式には、ユーザーが指定できる倍率が含まれています (ロジット関数の拡大係数の定義)。
目的地駐車場の選択は、[Cost for path distribution with Kirchhoff]-[キルヒホッフによる経路分布のコスト:] セクションの [Cost]-[コスト] タブで、動的配分のパラメータで行った次の設定によって異なります。これは、動的経路決定の目的地の駐車場選択にも適用されます (動的経路決定の定義)。
- [Measured path travel times]-[計測経路所要時間] が選択された場合は、目的地の駐車場選択は2回目のシミュレーション実行による経路の標準化されたコストを使用します。最初のシミュレーション実行では、旅行時間に関して利用できるデータが存在しないため、エッジの長さの合計が使用されます。エッジの開始からは、出発地の駐車場の終わりから最初のノードの境界線までの距離が考慮されます。エッジの終了からは、最後のノードの境界線から目的地の駐車場の始まりまでの距離のみが考慮されます。
- [Sum of edge travel times]-[合計エッジ旅行時間] が選択された場合は、すべてのエッジの長さ全体が使用されます。
駐車場のユーティリティー関数の定義

|
[Coefficient]-[係数] |
[Formula symbol]-[式内の記号] |
[Description]-[説明] |
[Description]-[説明] |
|---|---|---|---|
|
|
CParking
|
[Parking Cost]-[駐車コスト] |
駐車場の [Parking fee]-[駐車料金] 属性としてリスト表示される駐車料金 |
|
|
[Attraction]-[魅力度] |
Attraction] |
駐車場の [Attraction]-[魅力度]属性としてリスト表示されている魅力度 |
|
|
DDestination |
[Distance from desired zone]-[目的のゾーンからの距離] |
駐車場の場所と目的地ゾーンの中心との直線距離 |
|
|
DVeh |
[Distance from current position]-[現在地からの距離] |
現在位置(車両位置)からの最も安価な経路の標準化されたコスト |
|
|
fs |
[Current parking availability]-[駐車場の現在の可用性] |
無料の駐車スペースの可用性 |
|
k |
|
車両タイプのインデックス |
|
|
s |
|
意思決定状況、出発、経路決定、ルート案内サイクル1、ルート案内サイクル2のインデックス |
ユーティリティー関数には、次の項目が適用されます。
- [Attraction]-[魅力度] および [Current parking availability]-[現在の駐車可能性] の正の係数
- [Parking Cost]-[駐車コスト]、[Distance from desired zone]-[目的のゾーンからの距離]、[Distance from current position]-[現在位置からの距離] の負の係数
駐車場のユーティリティー関数の係数入力
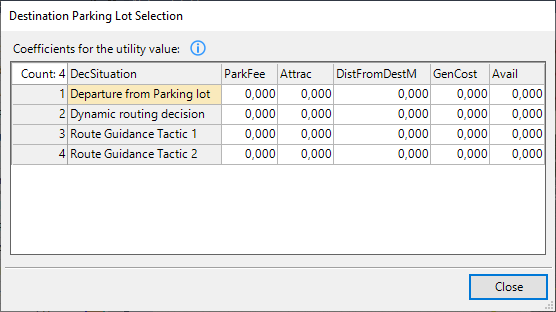
各車両タイプおよび、次の3つの意志決定状況のそれぞれに対して個別のユーティリティー関数の係数を入力できます。係数は、現在の車両位置から目的地の駐車場までの経路のうち、考えられる標準化されたコストが最も小さいものに対する重み付け係数となります。[生成コスト](標準化されたコスト)属性の [Vehicle Types]-[車両タイプ] リストに入力された係数の値を表示できます。
- [Departure from Parking lot]-[駐車場からの出発]:車両が出発地の駐車場からトリップを開始するとき
- [Dynamic routing decision]-[動的経路決定]:車両が動的経路決定を下すとき
- [Route Guidance Tactic 1]-[ルート案内手段1]、ルート案内手段2:ルート案内システムを搭載した車両が新しい情報を受け取るとき
出発時までに許容される目的地の駐車場の数は、目的地ゾーンに属しており、出発時点で空いている駐車場の数となります。決定は、動的経路決定またはルート案内システムによってトリガーされるものであり、選択される数量は設定戦略によって異なります (トリップチェーンファイル、マトリックス、経路ファイルおよびコストファイルの属性)。
1. [Base Data]-[ベースデータ]メニューの[Vehicle Types]-[車両タイプ]をクリックします。
[Vehicle Types]-[車両タイプ] リストが開きます。
2. 選択する車両タイプを右クリックします。
3. ショートカットメニューで、[Edit]-[編集]をクリックします。
[Vehicle Types]-[車両タイプ] ウィンドウが開きます。
4. [Special]-[特殊] タブを選択します。
5. [Destination Parking Lot Selection]-[目的地駐車場の選択] ボタンをクリックします。
[Destination Parking Lot Selection]-[目的地駐車場の選択] ウィンドウが開きます。次の手順で複数のエントリーを選択するには、[Ctrl] キーを押したままにしてください。
6. リストで、目的の意思決定状況(DecSituation)をクリックします。
7. リストボックスに、目的の係数を入力します。
|
|
注意: ロジットスケーリング係数による乗算後のユーティリティー関数の最大値と最小値の差は、4より大きくなってはなりません。 ユーティリティーの値の差が4の場合、良好な駐車場選択の確率が、望ましくない駐車場選択の確率の55倍となります。 注意: 以下に対しては、負の係数を選択します。
注意: 以下に対しては、正の係数を選択します。
|

|
|
警告:
いずれの場合も、*.errファイルと[Messages]-[メッセージ] ウィンドウに警告が保存されます。 |

選択された数量ですべての駐車場の使用が定義された場合、ロジット関数で選択確率が計算されます。
8. [OK] で確定します。
現在利用可能な駐車スペースの計算
駐車場選択全体における利用可能なスペースの最大数に対する、検討対象の駐車場の利用可能な駐車スペースの比率は、現在利用可能な駐車スペースの数と等しくなります。
別の目的地ゾーンからの距離
ゾーン内に駐車場が存在しても、目的ゾーンのすべての駐車スペースが使用中である場合などは、[distance from destination zone]-[目的地ゾーンからの距離] 情報が必要です。このような意思決定状況では、目的地ゾーンに属していない駐車場は、潜在的な目的地の駐車場となる場合があります。その後、Vissimは、別のゾーンの駐車場のうち、なるべく近いものを目的地の駐車場として選択します。
ゾーンの位置は、ゾーンの駐車場の座標の平均値から計算され、[Zones]-[ゾーン] リスト内の属性 [Center]-[中心] として表示される場合があります ([Traffic]-[交通] メニュー)。
ロジット関数の拡大係数の定義
1. [Traffic]-[交通]メニューで、[Dynamic Assignment]-[動的配分] > [Parameters]-[パラメータ]をクリックします。
[Dynamic Assignment: Parameters]-[動的配分:パラメータ] ウィンドウが開きます。
2. [Choice]-[選択] タブを選択します。
3. [Destination Parking Lot Selection]-[目的地駐車場の選択] セクションで、目的の値を入力します。
|
[Element]-[エレメント] |
[Description]-[説明] |
|---|---|
| [Logit scaling factor]-[ロジット拡大係数] | ロジット拡大係数μにより、ユーティリティーの相違に対して分布がどの程度強く反応するかが決定されます (経路検索の使用/非使用の経路選択の方法)。 |
| [Logit lower limit]-[ロジット下限] | 駐車場の選択確率がこの値を下回ると、駐車場は目的地の駐車場として選択されません。これにより、残りの駐車場の選択確率が上がります。 |
