トリップチェーンファイル、マトリックス、経路ファイルおよびコストファイルの属性
1. [Traffic]-[交通]メニューで、[Dynamic Assignment]-[動的配分] > [Parameters]-[パラメータ]をクリックします。
[Dynamic Assignment: Parameters]-[動的配分:パラメータ] ウィンドウが開きます。
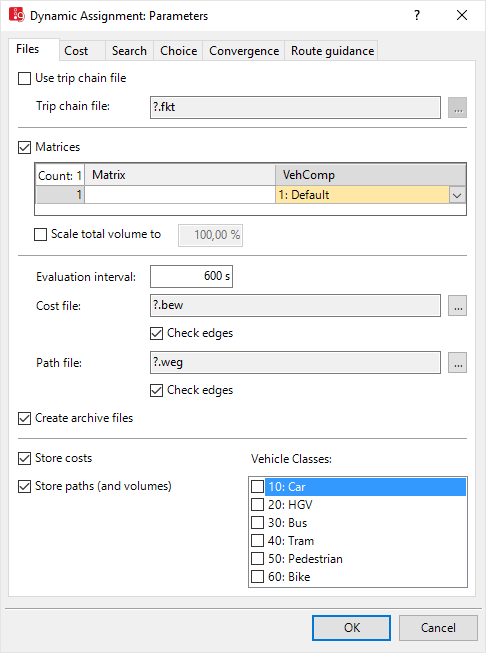
2. [Files]-[ファイル] タブを選択します。
3. 必要な変更を加えます。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[Use trip chain file]-[ユーザートリップチェーンファイル] |
 このオプションを選択すると、Vissimはトリップチェーンファイル*.fktに基づいて動的配分を実行します (トリップチェーンファイルによる交通需要のモデリング) このオプションを選択すると、Vissimはトリップチェーンファイル*.fktに基づいて動的配分を実行します (トリップチェーンファイルによる交通需要のモデリング) |
|
[Trip chain file]-[トリップチェーンファイル] |
一連のトリップチェーンを含む*.fktファイル |
|
[Matrices]-[マトリックス] |
|
|
[Scale total volume to]-[合計交通量の調整] |
すべての出発地-目的地マトリックス内の総需要を [%] 単位で指定したパーセンテージまで抑えます。この値は、[Dynamic assignment volume increment]-[動的配分の交通量増分] の値で出発地-目的地マトリックスの総需要を調整するための起点として使用されます (シミュレーションパラメータの定義)。抑えられた総需要のこの起点の値は、[Dynamic assignment volume increment]-[動的配分の交通量増分] によってシミュレーションパラメータ([Number of runs]-[処理の数] ボックス)で定義されたシミュレーションの実行ごとに、総需要の100%になるまで増加していきます (シミュレーションパラメータの定義)。 |
|
[Evaluation interval]-[評価間隔] |
コストの計算と経路の検索が行われる時間間隔。車両の経路選択は、これらの間隔で変更される場合があります。*.bewコストファイルが作成されていない場合に限り、変更可能です (旅行時間の判別に必要な評価間隔)。 |
|
[Cost file]-[コストファイル] |
現在の経路の現在のコストリストを含むファイル。さらに、これまでの2回のシミュレーション実行による抽象ネットワークグラフのエッジ時間とエッジの交通量も含まれます (動的配分のファイル)
|
|
[Path file]-[経路ファイル] |
経路アーカイブを含むファイル (動的配分のファイル)
コストファイルと経路ファイルのVissimチェック基準:
|
| [Create archive files]-[アーカイブファイルを作成] |
|
|
[Store costs]-[コストの保存] |
旅行時間と交通量がコストファイルに保存される特定の[Vehicle classes]-[車両クラス]を選択することができます。これらの車両クラス固有データには、エッジ属性および経路属性 [Travel time (old)]-[旅行時間(旧)]、[Travel time (new)]-[旅行時間(新)]、[Volume (old)]-[交通量(旧)] および [Volume (new)]-[交通量(新)]経由でアクセスできます。その後、サブ属性 [Time interval]-[時間間隔] および [Vehicle Class]-[車両クラス] を選択します。サブ属性 [Vehicle Class]-[車両クラス] は、ここで選択された車両クラスをベースとしています。選択された車両クラスに配分された車両タイプの各車両ごとに、経路検索と経路選択に車両クラス固有の値が使用されます。オプション [交通量使用(旧)]([Choice]-[選択] タブ)と組み合わせると、*.anmroutesファイル(PTV Visumからエクスポートされたものなど)のクラスに依存しない配分結果を、確率的偏差のみで再現することができます。 旅行時間は、[Cost]-[コスト] タブで選択された [smoothing method]-[平滑化メソッド] に基づいて平滑化されます。 |
|
[Store paths (and volumes)]-[経路(および交通量)の保存] |
|
 このオプションが選択されており、シミュレーションパラメータの
このオプションが選択されており、シミュレーションパラメータの 4. [OK] で確定します。
