シミュレーションパラメータの定義
シミュレーションを開始する前に、一般的なシミュレーションパラメータを設定できます。
その際、実行するシミュレーションの回数を入力できます。次に、シミュレーション実行の一般的な利用事例を紹介します。
- 結果の確率的保存のためのランダムシード(乱数の根)の変化
- 動的配分の反復実行
- 動的配分の総需要の連続的増加
シンプルなシミュレーションとの違いは、利用事例によって、ランダムシードなどの対応パラメータが各シミュレーション実行ごとに自動的に変更される点です。
1. 目的のシミュレーションの方法が選択されていることを確認してください (シミュレーション方法(マイクロスコピックまたはメソ)の選択)。
2. [Simulation]‐[シミュレーション] メニューで [Parameters]‐[パラメータ] をクリックします。
[Simulation parameters]-[シュミレーションパラメータ] ウィンドウが開きます。
3. [General]-[一般] タブを選択します。
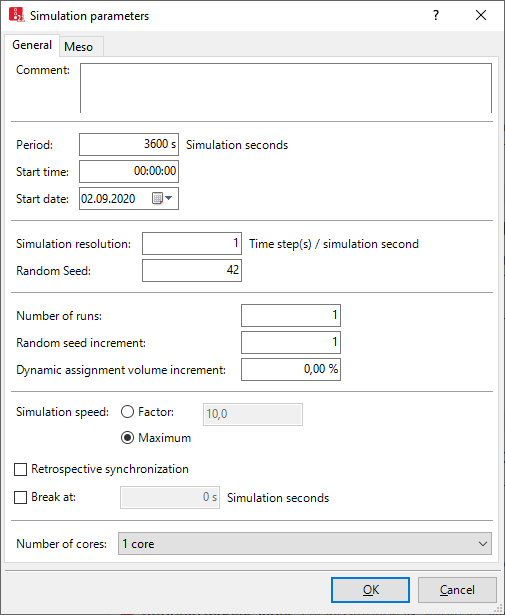
4. 必要な変更を加えます。
| [Element]-[エレメント] | [Description]-[説明] | ||
|---|---|---|---|
| [Comment]-[コメント] |
シミュレーション実行のID出力ファイルの冒頭に追加されます。ネットワークファイル*.inpxにコメントを保存するには、[File]‐[ファイル] メニューで [Save]‐[保存] をクリックします。 |
||
| [Period]-[期間] |
シミュレーション時間(単位:シミュレーション秒)。信号制御のためのリードタイムも考える必要があります。 |
||
| [Start time (time of day)]-[開始時刻] |
シミュレーションの開始時間はシミュレーション秒0です (ステータスバーの情報)。 |
||
| [Start date]-[開始日} |
日にち依存のロジックによる信号制御手順では、開始日がコントローラーDLLに転送されます。フォーマット:DD.MM.YYYY |
||
| [Simulation resolution]-[シミュレーション解像度] | |||
シミュレーション秒ごとの時間ステップ数:車両および歩行者が1シミュレーション秒中にどれだけの頻度で移動するかを指定します。
値の範囲:1~20の整数
|
|||
| [Random Seed]-[ランダムシード] |
この値により、乱数発生機構が初期化されます。同じネットワークファイルとランダムな開始番号を使用する2つのシミュレーション実行は同じように見えます。ここでランダムシードを変更すると、Vissimの確率関数に異なる一連の値が割り当てられ、交通流が変化します。これにより、たとえば、ネットワーク内の車両到着の確率的変化をシミュレーションすることができます。これによって、異なるシミュレーション結果が生じる可能性があります。これらのシミュレーション結果を比較することにより、確率的変化の影響を比較できます。この目的で、Vissimは、評価中のさまざまな結果属性に対する、最小値、最大値および平均値など、追加の有意義な値を計算します。
|
||
| [Number of runs]-[実行回数} |
行内で実行した複数のシミュレーションの処理の数。論理的な値の範囲:利用事例に応じて5~20。 動的配分の場合は、20回を越えるシミュレーションが必要な場合もあります。
|
||
| [Random seed increment]-[ランダムシードの増分] |
複数のシミュレーション実行を行う際のランダムシード間の差。この数字は、確率分布とは関係ありません。 動的配分中にモデルを収束させるには、0を入力します。 様々なランダムシードを使用して複数のシミュレーション実行を行うと、それぞれのシミュレーション実行の番号が評価ファイル*.ldpの名前に追加されます。 |
||
| [Dynamic assignment volume increment]-[動的配分の交通量増分] |
動的配分の場合のみ:指定された値によって([Number of runs]-[処理の数] ボックスで)定義されたそれぞれのシミュレーション実行で、出発地-目的地マトリクスの総需要を増やします。 使用される開始値は、動的配分のパラメータ [Scale total volume to]-[合計交通量の調整] です (トリップチェーンファイル、マトリックス、経路ファイルおよびコストファイルの属性)。それぞれの反復に対して、総需要の100%に達するまでこの値ずつ、需要が自動的に増やされます。総需要の100%に達したら、それ以降の追加のシミュレーション実行([Number of runs]-[実行回数] ボックスで指定)は、総需要の100%を使用して実行されます。総需要の100%を超える開始値を使用しないでください。 指定された [Number of runs]-[実行回数] により、総需要の100%に達するにはシミュレーション実行回数が不足しており、Vissimネットワークを保存した場合は、総需要の現在の値が、動的配分のパラメータ [Scale total volume to]-[合計交通量の調整] に保存されます。次回Vissimを開くと、この値が新たな開始値として使用されます。 |
||
| [Simulation speed]-[シミュレーション速度} |
低速撮影係数に対応:実際の秒数ごとのシミュレーション秒を示します 値1.0:シミュレーションがリアルタイムで実行されます。 値2.0:シミュレーションがリアルタイムの2倍速で実行されます。 最大オプション:このオプションを選択すると、シミュレーションを最高速度で実行します。 シミュレーション速度は、シミュレーション結果に影響しません。シミュレーション実行中にシミュレーション速度を変更できます。 大規模なネットワークや遅いコンピューターを使用している場合は、目的のシミュレーション速度に到達しない場合があります。 |
||
| [Retrospective synchronization]-[遡及同期] |
Vissimは、すべての時間間隔に関して、継続的シミュレーションが最後に開始されてから、実際の時間が経過するまで待機します。これによりVISSIMは、たとえば外部の信号制御やその他の外的要因により、より遅い個々の時間間隔で失われた時間を補うことができます。外部の制御ハードウェアを利用すると、失われた時間を同期機能によって取り戻すことができます。 Vissimで連続シミュレーション実行中にウィンドウを開くと、それが遅延の原因となります。ウィンドウを閉じると、最高シミュレーション速度を通じて、シミュレーション速度によって除算されたシミュレーション秒が実際に経過した総時間数と同じになるまで、遅延が補正されます。 連続シミュレーション実行のシミュレーション速度が遡及同期によって減速されると、Vissimは、実際の総時間数(シミュレーション開始後の)がシミュレーション速度で除算した現在のシミュレーション秒と等しくなるまで待機してから、次の時間間隔を実行します。 |
||
| [Break at]-[ブレイクポイント] | プログラムが自動的に [Simulation single step]-[シミュレーションのシングルステップ] モードに切り替わる直前のシミュレーション秒。このオプションを使用して、特定のシミュレーション時間での交通状態を見ることができます。 | ||
| [Number of cores]-[コア数] |
シミュレーション中に使用されているプロセッサコアの数。使用されるコアの最大数は、お使いのコンピューターによって異なります。次のシミュレーション実行を開始する際もこの設定が選択されたままとなります。 デフォルト:すべてのコアを使う 選択したコア数は、ネットワークファイル*.inpxに保存されます。この設定をシミュレーション実行中に変えることはできません。
|
||

 時間間隔の終わりに、この時間間隔に設定された実際の時間が経過するまで
時間間隔の終わりに、この時間間隔に設定された実際の時間が経過するまで5. [OK] で確定します。
[Simulation parameters]-[シュミレーションパラメータ] ウィンドウが閉じ、設定がネットワークファイルに保存されます。シミュレーション実行は、現在の設定で開始されます。ステータスバーには、現在のシミュレーション実行の番号が表示されるほか、実行済みのシミュレーション実行の総数が括弧内に表示されます。評価ファイルが選択したディレクトリに保存されます。
指定したシミュレーションパラメータは、次のシミュレーションまたはテストの実行時に考慮されます。
