動的配分の駐車場の定義
動的配分では、さまざまなタイプの駐車場を定義できます (駐車場タイプの使用)。
駐車場の配置と経路計算の条件
- 駐車場は常に、2つのノードの間または1つのノード内のエッジに配置する必要があります。
- 全長がエッジにかからない駐車場は、出発車両の出発地、到着車両の目的地として同じエッジを使用することはできません。
- エッジまたはターン関係は、複数の車線上の実際の駐車スペースが隣接するリンク経由で存在する場合があります。1つのノード内で、駐車場が複数のターン関係上に存在する場合もあります。Vissimは、これらのエッジに基づいて経路を計算します。
- 車両が走行して通過できない駐車場のあるエッジ経由でルートを引くことはできません。次のような状況の場合がこれに該当します。
- 1つのエッジ上にゾーンコネクターまたは抽象駐車場が存在する場合
- エッジ上の1車線のみのリンク上に実際の駐車スペースがある駐車場が存在する場合
出発地の駐車場や目的地の駐車場は、このようなエッジ上に存在します。
- ゾーンコネクターのあるエッジ上、抽象駐車場、または、1車線のみのリンク上に実際の駐車スペースを持つ駐車場には、追加の駐車場を配置できません。
- 駐車場が目的地の交通のためのリンク上にのみ配置されており、そのリンクがネットワークの外部につながっていて、そのリンクから別の駐車場へ到達できないようになっている場合、この駐車場の相対交通量はゼロに設定する必要があります。このような駐車場でも、2つのノードの間に配置する必要があります。
エッジのコストの決定
駐車場が配置されているエッジのコストは、該当する駐車場に出入りするすべての車両のコストの平均として決定されます。
スペースがブロックされている場合の駐車スペースの選択
駐車スペース決定を横切る場合に、目的地のすべての駐車場にブロックされた駐車スペースしかなければ、最も誘引力のあるブロックされた駐車スペースが埋まっていない場合、その駐車スペースが選択されます。
駐車場経路決定の効果は、車両経路への戻り方によって異なります
車両がルート上にあるときは、駐車スペース決定の下流でルートを続行できるような駐車スペース経路決定でのみ、駐車スペースを選択できます。そうでない場合は、駐車経路決定は無視されます。車両がルート上にないときは、一般的に、利用可能な駐車スペースを選択することになります。
1. 希望の駐車場を定義します (駐車場の定義)。
[Parking Lot]-[駐車場] ウィンドウが開きます。
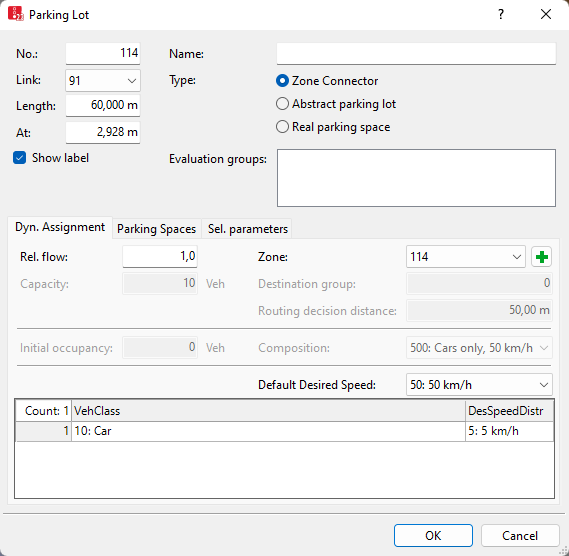
2. タブ [Dyn.] を選択します。[Assignment]-[動的配分]タブを選択します。
3. 駐車場が、[Type]-[タイプ] として、ゾーンコネクターを備えた出発地の駐車場または目的地の駐車場として使用するためのものである場合は、[Zone Connector]-[ゾーンコネクター] を選択します。
4. 必要な変更を加えます。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
| [Rel. flow]-[相対交通流] |
RelFlow: 以下の場合のみ該当します。
サンプル値0 = ネットワークから出発するリンク上の駐車場で、出発する交通がない。複数の駐車場の場合、ゾーンの値の合計 = 100%。ゾーンごとの占有率を決定するために使用されます。すべての駐車場の相対交通量を合計交通量に設定できます (合計交通量に対するすべての駐車場からの相対交通量の設定) |
| [Capacity]-[容量] |
[Abstract parking lot]-[抽象的駐車場] 属性の駐車場にのみ関連します:車両の最大数。 [Real parking spaces]-[実際の駐車スペース] の場合、値は、駐車場の長さと駐車スペースごとの長さから算出されます。容量は変更できません。 |
| [Zone]-[ゾーン] |
出発地-目的地マトリックスの駐車場のゾーン番号。1つのゾーンに複数の駐車場が属する場合があります。ゾーン数により、ODマトリックスのディメンションが定義されます (マトリックスエディタにおける車両交通のODマトリックスの編集)。
|
| [Destination group]-[目的地グループ] |
[Real parking spaces]-[リアルパーキングスペース]属性のある駐車場にのみ該当:駐車場が割り当てられる駐車場目的地グループの番号。車両は、この目的地グループに属する駐車場のいずれかを目的地とする場合、この目的地グループに属する任意の駐車場を選択することができます。目的地グループ番号を割り当てられていない駐車場は、どの目的地グループにも属しません。割り当てられた駐車場は、目的地グループのすべての駐車スペース決定に割り当てられます。これにより、駐車スペース決定までの距離の合計、および駐車スペース決定のグループ化に許容された最大距離(デフォルトは50 m + 50 m)を超えて、割り当てられた駐車場から駐車スペース決定がさらに配置されることはありません。 目的地グループの駐車場については、互いの距離が50 m未満である場合は、自動生成された駐車スペース決定が自動的に結合されます。車両の目的地を目的地グループの駐車場の1つにして、目的地グループの駐車場を選択できるようにする場合、[Dynamic]-[動的]タイプの経路決定で選択された[Criterion]-[基準]は、その駐車場が属する目的地グループのすべての駐車場にも適用されます。例: [Parking lot full]-[駐車場が満車] =グループの駐車場がすべて埋まっています。 駐車スペース決定は、シミュレーション開始時に自動的に生成されます (駐車場タイプの使用)。駐車スペース決定は、リスト内での表示や編集はできません。 |
| [Routing decision distance]-[経路決定距離] | RoutDecDist:駐車場までの駐車スペース決定の距離 |
| [Initial occupancy]-[初期占有率] |
InitOccup:[Abstract parking lots]-[抽象的駐車場] および [Real parking spaces]-[実際の駐車スペース] にのみ関連します。 車両における初期占有率により、シミュレーション開始時に目的地の駐車場選択のためにどの駐車場の占有率を計算すべきかが指定されます。これは、動的経路決定にも適用されます。初期占有率は、いつ駐車場の容量に達したかを判断する際にも役立ちます。駐車場に到着してからシミュレーション中に駐車場を離れる車両の数は入力しないでください。これらは、出発地-目的地マトリックスに含まれる場合があります。[Real parking spaces]-[実際の駐車スペース] には、初期占有率の構成を入力します。 |
| [Composition]-[構成] |
InitOccupComp:[Real parking spaces]-[実際の駐車スペース] にのみ該当:[Initial occupancy]-[初期占有率] に適切な車両構成を選択します (車両構成のモデリング)。 |
| [Default Desired Speed]-[デフォルトの希望速度] | [Desired speed distribution default]-[デフォルト希望速度分布](DesSpeedDistrDef):割り当てられた希望速度分布および車両クラスごとの希望速度。デフォルトの希望速度分布および希望速度は、下のリストに表示されているどの車両クラスにも属さないタイプのすべての車両に使用されます。 |
 :
:5. [OK] で確定します。
属性は、[Parking Lot]-[駐車場] のリストに保存されます (駐車場の属性)。
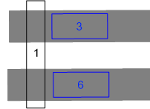
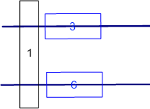
ネットワークのエッジ上にあるゾーンコネクターのモデリング例
この図は、サンプルファイル..\dynamic assignment\Drop-Off zone.Trip Chains\Drop-Off Zone inpxのゾーンコネクターを示しています。
| [Toggle wireframe off]-[ワイヤフレームをオフに切り替え] | [Toggle wireframe on]-[ワイヤフレームをオンに切り替え] |
|---|---|
|
|
|
|
合計交通量に対するすべての駐車場からの相対交通量の設定
Visumからネットワークをエクスポートし、新たなマトリックスファイルと新たな経路ファイルで別の交通量シナリオを使用する場合は、出力された駐車場の相対交通量の方が、より適したものとなります。
- ► [Ctrl + Shift + C]ホットキーを押します。
すべての駐車場の相対交通量が、現在の経路ファイル*.weg内の経路の合計交通量に設定されます。
駐車場のモデリング時のエラー回避
「The origin parking lot 1 is part of several different edges(出発地の駐車場1が複数のエッジに属しています)」といったエラーは、少なくとも1つのノードが欠けているか、または正しく配置されていないことを示しています。このため、駐車場をはさむ両ノードの間に複数の経路が見つかる可能性があります。これらの経路のそれぞれに対し、別々のコストが決定されます。このため、リンク順序(現実の場合は「街路」)に対してさまざまなリンクコストが発生する可能性があり、車両分布が不正確となる原因になります。
この問題を避けるために、Vissimネットワーク内に駐車場を配置する際は、次の項目を徹底してください。
- 動きの方向で、経路の起点をノードを構成する駐車場の前に配置すること。
- 動きの方向で、経路の終点をノードを構成する駐車場の後ろに配置すること。
- 駐車場をはさむ両方のノードを正しくモデリングし、経路の起点と終点を2つのノードの間に配置すること。
