Редактирование параметра манеры езды "Ошибочное поведение"
В имитации можно учесть различные варианты ошибочного поведения водителя.
- Временная невнимательность водителя приводит к тому, что транспортное средство не реагирует на движущиеся впереди ТС (Временная невнимательность при отслеживании).
- Временное отвлечение внимания водителя приводит к отклонению поперечного положения транспортного средства (Определение ошибочного поведения из-за отклонения водителя).
- Временная неверная оценка скорости движения других транспортных средств влияет на расчет промежутка в основном потоке, а также на различные конфликтные ситуации (Временная ошибочная оценка скорости других транспортных средств).
- Если уменьшить количество объектов взаимодействия, которые распознает транспортное средство, то можно имитировать невнимательность на перекрестках. Для этого выберите, чтобы конфликтные зоны также воспринимались как объекты взаимодействия (Моделирование невнимательности на перекрестках).
- Если транспортное средство превышает критическую скорость на повороте, это может привести к ухудшению управляемости транспортным средством и его боковому смещению. Определите в этом случае скорость смещения, критическую скорость и радиус в соответствующей точке отрезка (Применение скорости сноса), (Определение критической скорости), (Атрибуты отрезков).
1. Выберите в меню Базовые данные > Манера езды.
Откроется список Манера езды. Некоторые наборы параметров манеры езды можно определить предварительно.
По умолчанию можно редактировать список.

|
Примечание: Можно показать и скрыть в списках столбцы со значениями атрибутов, используя символ |

2. Нажмите правой кнопкой мыши на желаемую запись.
3. Выберите в контекстном меню запись Редактировать.
Откроется окно Манера езды.
4. Выберите вкладку Ошибочное поведение.
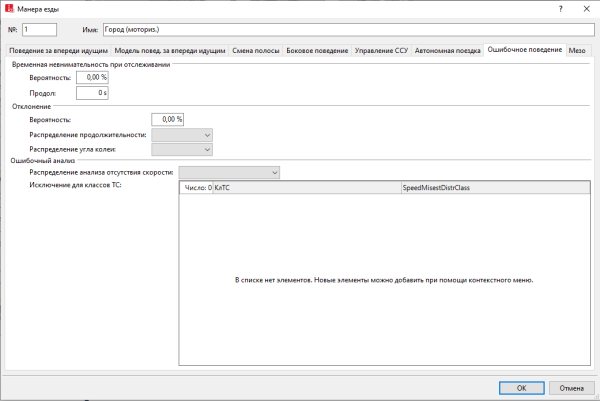
5. Отредактируйте атрибуты нужного варианта ошибочного поведения.
Временная невнимательность при отслеживании
Во время имитации можно учесть, чтобы водитель транспортного средства временно реагировал только на экстренное торможение ТС, идущих впереди. С растущими значениями снижается пропускная способность соответствующих отрезков.
| Элемент | Описание |
|---|---|
|
Вероятность |
Временная невнимательность — вероятность сна: частота проявления невнимательности. |
|
Продол. |
Временная невнимательность — продолжительность сна (ПродСна): период времени невнимательности, при котором транспортные средства не реагируют на впереди идущее ТС. Однако транспортные средства реагируют на экстренное торможение. |
Определение ошибочного поведения из-за отклонения водителя
В имитации можно учесть, чтобы водитель транспортного средства временно отвлекался, что приводит к отклонению бокового положения ТС. Для этого можно отредактировать следующие атрибуты манеры езды.
| Элемент | Описание |
|---|---|
|
Вероятность |
Вероятность отвлечения (ВероятнОтвл): вероятность того, что в течение одной секунды имитации транспортное средство непреднамеренно изменит свое боковое положение и вступят в силу атрибуты Распределение продолжительности отвлечения и Распределение угла полосы при отвлечении. Затем транспортное средство возвращается на требуемую поперечную позицию. Диапазон значений 0 до 100. |
|
Распределение продолжительности |
Распределение продолжительности отвлечения (РаспрПродОтвлеч): распределение за период времени, в течение которого угол полосы транспортного средства изменяется с помощью значения, полученного на основе параметра Распределение угла полосы при отвлечении (Применить распределения времени). |
|
Распределение угла колеи |
Распределение угла полосы при отвлечении (РаспрУглаПолОтвлеч): распределение угла, под которым транспортное средство отклоняется от середины полосы движения (Применить свободные распределения). Диапазон значений в радианах: от 0 до 1,5 рад. |
Если выбраны три атрибута и на ТС влияет манера езды, то транспортное средство переходит в состояние отвлечения при следующих условиях.
- При манере езды Вероятность отклонения > 0.
- Установлено Распределение продолжительности.
- Установлено Распределение угла колеи.
Для этого Vissim на каждом временном шаге подставляет случайное число от 0 до 100. Это случайное число меньше следующего параметра.
Вероятность отклонения, разделенная на параметр Частота расчета (временной(ые) шаг(и)/секунда(ы) имитации).
Vissim подставляет случайное значение Альфа на основании параметра Распределение угла колеи, а также случайное значение t на основании параметра Распределение продолжительности. В течение следующих t секунд имитации транспортное средство движется в сторону под углом Альфа относительно середины полосы движения. Оно движется независимо от всех транспортных средств на отрезке и от края полосы магистрали. Vissim определяет направление отклонения вправо или влево случайным образом. По истечении времени t транспортное средство автоматически возвращается в заданное положение Желаемая позиция (Редактирование параметров манеры езды Боковое поведение). Новое отклонение может начинаться только после того, как транспортное средство достигнет нужного положения.
На протяжении всего маневра отклонения действуют следующие условия.
- Ускорение транспортного средства постоянное.
- Транспортное средство игнорирует все другие ТС и объекты сети, например светофоры, правила приоритета, конфликтные зоны, знаки «Стоп».
- Если в опции манеры езды транспортных средств на соседних полосах движения для бокового поведения выбрано Учесть соседние полосы движения, то эти транспортные средства полностью игнорируют боковое отклонение транспортного средства, которое рассматривается как все еще находящееся на своей полосе движения.
Атрибут ТС Поперечное отклонение (отвлеч.) отображает боковое отклонение в текущем временном шаге (Отображение ТС в сети в списке).
Временная ошибочная оценка скорости других транспортных средств
В имитации можно учесть, чтобы водители временно неправильно оценивали скорость других транспортных средств. Ошибочная оценка скорости сказывается, например, на расчете конфликтного времени в правилах приоритета и конфликтных зон, а также при смене полос движения и при обгоне по встречной полосе.
1. Убедитесь в том, что по меньшей мере одно эмпирическое свободное распределение определено следующими свойствами (Применить свободные распределения).
| Атрибут | Описание |
|---|---|
| x |
Коэффициент, умноженный на текущую скорость других транспортных средств. Фрактиль для этого коэффициента является постоянным для всех транспортных средств в течение всего времени их пребывания в сети. В результате одни транспортные средства всегда будут завышать скорость, а другие — занижать. Транспортные средства с коэффициентом х, не равным 1, дополнительно игнорируют текущее и будущее ускорение других транспортных средств в конфликтных зонах и оценивают их будущую траекторию движения только на основе их текущей скорости, умноженной на коэффициент х. |
| y |
Кумулятивная вероятность для всех значений вплоть до x. Транспортное средство, на котором происходит занижение скорости, занижает или завышает скорость других транспортных средств в ходе имитации. Транспортное средство не меняется на протяжении цикла имитации между периодами завышения и занижения скорости других транспортных средств. |
2. Выберите свободное распределение в области Ошибочный анализ в атрибуте Распределение ошибочной оценки скорости, которое должно использоваться по умолчанию для транспортных средств с соответствующей манерой езды.
| Полное имя | Краткое имя | Описание |
|---|---|---|
|
Распределение ошибочной оценки скорости (по умолчанию) |
vРаспрОшОценкиСтд |
Распределение по степени вероятности ошибочного анализа скорости движения других транспортных средств. Выдает значения >= 0. |
Распределение эффективно только в следующих конфликтных ситуациях.
- Конфликтные зоны с воздействием между транспортными средствами. Vissim заново рассчитывает конфликтное время. Если значение x из выбранного свободного распределения для транспортного средства не равно 1, транспортное средство игнорирует текущее и будущее ускорение и замедление других транспортных средств. Транспортное средство учитывает только результат умножения текущей скорости транспортных средств на коэффициент x.
- Правила приоритета: транспортное средство анализирует соответствие величины конфликтного расстояния и времени на отрезках с приоритетом. Скорость других транспортных средств умножается на коэффициент на основе параметра Распределение анализа отсутствия скорости. Затем транспортное средство заново анализирует правило приоритета и реагирует на него. Транспортное средство не может неправильно оценить скорость транспортных средств, идущих задним ходом. Если транспортное средство движется задним ходом, оно может неправильно оценивать скорость транспортных средств, вверх по потоку, приближающихся спереди.
- Обгон по полосе встречного движения: Vissim использует текущую скорость встречного транспортного средства. Если встречного транспортного средства не видно, будет использовано значение атрибута Принятая скорость встречного транспорта, определенное на отрезке.
- Смена полосы
3. Выполните следующие шаги для всех классов транспортных средств, для которых необходимо применить другой параметр Распределение ошибочной оценки скорости.
4. Щелкните правой кнопкой мыши по списку Исключение для классов ТС.
5. Выберите в контекстном меню запись Добавить.
6. Выберите Класс ТС и нужный параметр Распределение ошибочной оценки скорости, который должен для него действовать.
7. Подтвердите с помощью OK.
Если манера езды транспортного средства содержит специфическое распределение для класса ТС, к которому относится тип рассматриваемого транспортного средства, то используется это распределение, в противном случае используется стандартное распределение, если оно указано.
Моделирование невнимательности на перекрестках
Можно побудить транспортное средство распознавать конфликтные зоны как объекты взаимодействия. В результате транспортное средство будет распознавать другие объекты взаимодействия менее достоверно, так как количество объектов взаимодействия, которые распознает транспортное средство, ограничено (Редактировать параметр манеры езды Поведение за впереди идущим ТС).
- Убедитесь в том, что в списке Манера езды отображаются следующие столбцы.
| Элемент | Описание | |
|---|---|---|
|
КонфлЗонОбъектВзаимод |
Рассматривать конфликтные зоны как объекты взаимодействия: |
|
 . Если эта опция выбрана, то транспортное средство также учитывает конфликтные зоны как объекты взаимодействия при приближении к конфликтным зонам.
. Если эта опция выбрана, то транспортное средство также учитывает конфликтные зоны как объекты взаимодействия при приближении к конфликтным зонам.Вышестоящая тема: