Редактировать параметр манеры езды Поведение за впереди идущим ТС
1. Выберите в меню Базовые данные > Манера езды.
Откроется список Манера езды. Некоторые наборы параметров манеры езды можно определить предварительно.
По умолчанию можно редактировать список.
Можно изменять все параметры манеры езды в списке или во вкладках, выполняя следующие шаги.

|
Примечание: Можно показать и скрыть в списках столбцы со значениями атрибутов, используя символ |

2. Нажмите правой кнопкой мыши на желаемую запись.
3. Выберите в контекстном меню запись Редактировать.
Откроется окно Манера езды.
4. Выберите вкладку Поведение за впереди идущим.
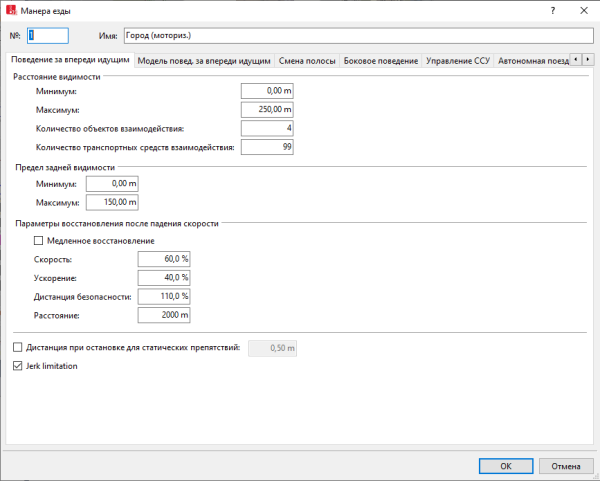
5. Введите желаемые данные.
| Элемент | Описание |
|---|---|
|
Расстояние видимости |
Минимум, Максимум: минимальное и максимальное расстояние, на которое ТС может смотреть вперед, чтобы реагировать на транспортные средства и объекты взаимодействия вниз по направлению движения вдоль своего маршрута или пути. В дополнение к введенному количеству объектов взаимодействия, транспортное средство учитывает расстояние видимости. При приближении к неподвижному препятствию расстояние видимости также способствует тому, чтобы транспортное средство равномерно снижало скорость. Минимальное расстояние видимости имеет значение, если учитывается боковое поведение транспортных средств.
Максимальное расстояние видимости необходимо повышать, только если, например, моделируется железнодорожный транспорт с блок-сигналами (Моделировать блок-сигналы для железнодорожного транспорта). |
|
Количество объектов взаимодействия |
Количество транспортных средств впереди и (или) количество объектов сети, перечисленных ниже, которые транспортное средство распознает вдоль своего маршрута или пути, чтобы реагировать на них. В дополнение к введенному количеству объектов взаимодействия, ТС учитывают минимальное и максимальное Расстояние видимости. Следующие объекты сети смоделированы в Vissim в виде транспортных средств. Транспортные средства воспринимают эти объекты сети как впереди идущее ТС. Эти объекты сети действуют в этом случае как красный светофор. Если несколько из этих объектов сети расположены на очень малом расстоянии друг от друга, укажите более высокое значение Количество объектов взаимодействия. В результате этого незначительно может увеличиться время расчета имитации.
Транспортные средства воспринимают следующие объекты сети также как впереди идущее ТС, если они должны там остановиться:
Поведение в конфликтных зонах: транспортное средство учитывает ниже по потоку все конфликтные зоны вплоть до наиболее удаленного объекта взаимодействия, указанного в количестве объектов взаимодействия. Конфликтные зоны включаются в Количество объектов взаимодействия, если в применяемой манере езды выбрана опция для атрибута Конфликтные зоны, считающиеся объектами взаимодействия (Редактирование параметра манеры езды "Ошибочное поведение"). Значения по умолчанию Количество объектов взаимодействия для предустановленной манеры езды.
Можно указать в атрибуте Количество транспортных средств взаимодействия количество транспортных средств, которые Vissim будет учитывать в параметре Количество объектов взаимодействия наряду с вышеупомянутыми объектами сети. Транспортное средство распознает максимальное Количество объектов взаимодействия. |
|
Количество транспортных средств взаимодействия |
Количество передних транспортных средств, на которые реагирует транспортное средство на маршруте или пути следования.
Значение по умолчанию для всех предварительно определенных вариантов манеры езды: 99 транспортных средств. Например, если моделируется беспилотное транспортное средство, чьи датчики не могут обнаружить другие ТС сквозь впереди идущее транспортное средство, задайте значение Количество транспортных средств взаимодействия = 1. |
|
Предел задней видимости |
Минимум, Максимум: минимальное и максимальное расстояние предела задней видимости транспортного средства, чтобы реагировать на транспортные средства вверх по направлению движения. Предел задней видимости влияет в ТС только на восприятие других транспортных средств; транспортное средство не распознает другие объекты взаимодействия. Количество объектов взаимодействия в параметре Предел задней видимости учитывается только при расчете бокового поведения ТС. Во всех остальных случаях для предела задней видимости транспортное средство распознает не более одного другого транспортного средства. Влияние минимального предела задней видимости на боковое поведение Если в пределах полосы движения возможен обгон, то введите значение больше 0,00, например внутри города 20–30 м, вне населенных пунктов, соответственно, большие значения. Это позволяет избежать ситуации, когда транспортные средства проезжают сквозь друг друга, если перед стоп-линией на одном и том же отрезке намереваются перестроиться больше транспортных средств, чем указано в атрибуте Количество объектов взаимодействия. Это действительно прежде всего для вело- и мототранспорта. Максимальный предел задней видимости можно уменьшить, например, в густых сетях с большим количеством соединяющих отрезков, расположенных на незначительном расстоянии друг от друга. Это может положительно повлиять на скорость имитации. |
|
Дистанция при остановке для статических препятствий |
Дистанция остановки (ax) для транспортных средств против направления движения относительно статических препятствий. Это, например, светофоры, знаки «Стоп», остановки, перекрестки, конфликтные зоны. Не действует для знаков Стоп на автостоянках. Минимальное значение: 0,01 м, максимальное значение 10 м, значение по умолчанию 0,5 м. При открытии файла *.inpx со значением атрибута 0 это значение изменяется на 0,01 м. Эта дистанция остановки также позволяет установить позицию остановки транспортных средств ОТ на остановках с защитными дверями платформ и очередями на установленных позициях платформы. При этом транспортное средство ОТ останавливается на остановке так, что его переднее ребро находится на позиции Дистанция остановки (ax)+ 1 м. Один метр гарантирует, что транспортное средство ОТ сможет выехать с остановки. Чтобы обеспечить возможность посадки и высадки, длина остановки должна по меньшей мере соответствовать следующему значению: длина транспортного средства ОТ + дистанция остановки (ax)+ 1 м. Транспортные средства останавливаются перед светофорами при следующем значении: дистанция остановки (ax)+ 0,5 м. |
|
Ограничение рывка |
ОгрРывка:
В приведенных ниже ситуациях ограничение рывка не происходит, даже если выбрана опция Ограничение рывка.
|
 Если эта опция выбрана, ускорение транспортного средства между двумя временными шагами ограничено.
Если эта опция выбрана, ускорение транспортного средства между двумя временными шагами ограничено. Если эта опция не выбрана, ускорение транспортного средства может произвольно изменяться между двумя временными шагами. Например, транспортное средство, ускоряющееся после остановки, может достичь нужного ускорения.
Если эта опция не выбрана, ускорение транспортного средства может произвольно изменяться между двумя временными шагами. Например, транспортное средство, ускоряющееся после остановки, может достичь нужного ускорения.В списке Манера езды можно выбрать дополнительные атрибуты. Например, следующие:
| Элемент | Описание |
|---|---|
|
Повышенное ускорение |
ПовышУскор: увеличение ускорения, с которым транспортное средство будет следовать за впереди идущим ускоряющимся транспортным средством. Значение по умолчанию 100 %, диапазоны значений от 100 до 999 %. При значении по умолчанию 100 % транспортное средство отдаляется, если ускоряется впереди идущее ТС. Только когда впереди идущее ТС перестанет ускоряться, произойдет сближение. При значении > 100 % транспортное средство ускоряется, если ускоряется впереди идущее ТС и возможно свободное ускорение. Повышенное ускорение действует в моделях следования за впереди идущим Видеман 74 и Видеман 99. Повышенное ускорение воздействует на следующие ускорения.
Ограничение рывка в модели ТС Видеман 99: если транспортное средство находится в состоянии интеракции Желание, то в первом временном шаге ТС ускорение ограничивается параметром модели CC7 Ускорение во время колебания. Ограничение рывка не выполняется, если для повышенного ускорения выбрано значение > 100 %, расстояние dx > дистанция безопасности dsx и впереди идущее ТС ускоряется. |