Редактирование параметров манеры езды Боковое поведение
По умолчанию транспортное средство использует в Vissim всю ширину полосы движения. В параметрах манеры езды можно определить боковое поведение, могут ли транспортные средства ехать в пределах полосы движения слева, справа, в середине или без указания боковых параметров. Если полоса движения достаточно широкая и атрибутами в области Стандартное поведение при обгоне на той же или соседней полосе допускается обгон на этой же полосе, тогда возможны также ситуации обгона в пределах полосы движения. Если максимальное замедление обгоняющего транспортного средства не позволяет ему своевременно затормозить, тогда транспортное средство по возможности обгоняет другое транспортное средство, даже если это не допускается параметром манеры езды Учитывать следующее направление поворота и Мин. боковая дистанция для всех типов транспортных средств. Таким образом, неразрешенный обгон окажется предпочтительнее столкновения.
Кроме того, эти настройки учитываются, если выбрана опция Учесть соседние полосы движения.
1. Выберите в меню Базовые данные > Манера езды.
Откроется список Манера езды. Некоторые наборы параметров манеры езды можно определить предварительно.
Можно изменять все параметры манеры езды в списке или во вкладках, выполняя следующие шаги.

|
Примечание: Можно показать и скрыть в списках столбцы со значениями атрибутов, используя символ |

По умолчанию можно редактировать список.
2. Нажмите правой кнопкой мыши на желаемую запись.
3. Выберите в контекстном меню запись Редактировать.
Откроется окно Манера езды.
4. Выберите вкладку Боковое поведение.
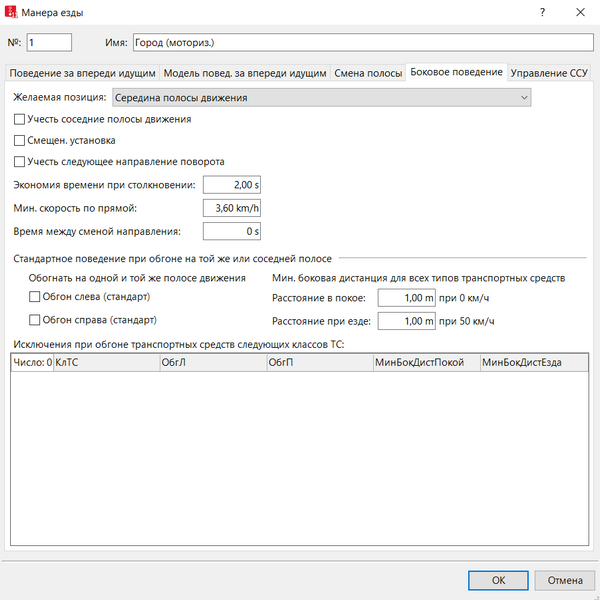
5. Выполните желаемые настройки:
| Элемент | Описание | ||
|---|---|---|---|
|
Желаемая позиция |
Желаемая поперечная позиция при свободном движении (ЖелПоперПоз): боковое выравнивание транспортного средства в пределах полосы движения при свободном транспортном потоке. При изменении в разделе Настройки сети пункта Правила дорожного движения Vissim изменяет значения атрибутов Направо на Налево, а Налево — на Направо (Выбрать настройки сети для манеры езды ТС). |
||
|
Учесть соседние полосы движения |
УчестьСосПД:
|
||
|
Смещенная установка |
СмещУст: |
||
|
Учитывать следующее направление поворота |
УчестьСледПов: обеспечивает боковое поведение, при котором в случае движения без назначенной полосы учитывается другое транспортное средство, как показано ниже: Опция Учесть следующее направление поворота учитывает также атрибут Желаемое направление следующего соединяющего отрезка маршрута ТС (Атрибуты соединяющих отрезков). Если для этого атрибута выбрана опция Слева, тогда транспортное средство справа объедет другое ТС только в том случае, если оно повернет не позднее этого же соединяющего отрезка. Транспортное средство включает сигнал поворота, если выбрана опция Учесть следующее направление поворота, ТС выполняет смену полосы в пределах определенного в атрибуте Перестроение на нужную полосу расстояния при смене полос движения и при этом выбран атрибут Слева или Справа соединяющего отрезка.
|
||
|
Экономия времени при столкновении |
Мин.экономия времени до столкновения (МинЭконВрСтолк): минимальное значение для увеличения времени до столкновения со следующим транспортным средством или светофором, которое должно быть достигнуто за счет бокового движения на полосе движения, чтобы оно воспринималось как целесообразное и было выполнено. Время до столкновения рассчитывается на основе нужной скорости транспортного средства. Значение по умолчанию для экономии времени при столкновении составляет две секунды. Меньшие значения ведут к более оживленному боковому поведению, так как транспортные средства начинают маневрировать даже уже для получения минимального преимущества. Значение по умолчанию 2,0 с. |
||
|
Мин. скорость по прямой |
Мин.продольная скорость для бокового движения (МинСкорБок): минимальное значение продольной скорости, которое еще позволяет совершить движение в сторону. Значение по умолчанию 1 км/ч гарантирует, что транспортные средства будут совершать боковое движение даже в том случае, если они уже почти полностью остановились. |
||
|
Время между сменой направления |
Минимальное время между сменой направления (боковое поведение) (СмНапрМинВр): значение по умолчанию 0,0 с. Определяет, сколько времени имитации должно пройти по меньшей мере между началом бокового движения в данном и обратном направлении. Чем больше это значение, тем более незначительны боковые маневры транспортных средств. Боковые маневры имеют место только в том случае, если на этой же полосе разрешен обгон. Боковое движение для смены полосы движения не подвержено влиянию данного параметра. Значение по умолчанию 0 с. |
||
|
Стандартное поведение при обгоне на той же или соседней полосе |
Действует для всех классов ТС, исключая классы, указанные в области Исключения при обгоне транспортных средств следующих классов ТС.
Минимальное боковое расстояние умножается на стохастическое значение z.
|
||
|
Исключения при обгоне транспортных средств следующих классов ТС |
Манера езды, отличная от стандартного поведения при обгоне на той же или соседней полосе, для выбранных классов транспортных средств. Для моделирования движения без привязки к полосам можно выбирать классы ТС, которые можно обгонять в пределах полосы движения ТС этого набора параметров манеры езды. 1. Щелкните правой кнопкой мыши по списку. 2. Выберите в контекстном меню запись Добавить. Будет вставлена новая строка со стандартными данными. 3. Выполните желаемые настройки:
|
 . Если эта опция выбрана, то транспортные средства учитывают позицию и тем самым боковое расположение транспортных средств на соседних полосах движения и придерживаются дистанции, заданной в атрибуте
. Если эта опция выбрана, то транспортные средства учитывают позицию и тем самым боковое расположение транспортных средств на соседних полосах движения и придерживаются дистанции, заданной в атрибуте  Если эта опция не выбрана, то транспортные средства на соседней полосе не учитываются, даже если они шире, чем их полоса движения, за исключением случая, когда они выполняют смену полосы движения.
Если эта опция не выбрана, то транспортные средства на соседней полосе не учитываются, даже если они шире, чем их полоса движения, за исключением случая, когда они выполняют смену полосы движения.