Attributes of parking lots
The Parking Lot window opens when you insert a network object and have selected to automatically open the Edit dialog after object creation (Right-click behavior and action after creating an object). By default, only the Parking Lots list is opened.
Into the window, you enter attribute values for the network object. For network objects which have already been defined, you can call the window using the following functions:
- ► In the list of network objects of the network object type, double-click the row with the desired network object.
- ► In the Network editor, select the network object of your choice. Then, on its shortcut menu, click Edit.
The network object may have additional attributes. In the network objects list of the network object type, you can show all attributes and attribute values. You can open the list via the following functions:
- ► On the network object sidebar, right-click the desired network object type. Then on the shortcut menu, click Show List (Shortcut menu in the network object sidebar).
- ► In the Network editor, select the network object of your choice. Then, on its shortcut menu, click Show In List (Selecting network objects in the Network editor and showing them in a list).
- ► On the Lists menu, in the desired category, click the network object type.
In the network objects list of the network object type, you can edit attributes and attribute values of a network object (Selecting cells in lists), (Using lists).
The objects of this object type may have relations to other objects. This is why the attributes list is shown as part of a coupled list (on the left). On the Lists toolbar, in the Relations box, you can show and edit the coupled list with the attributes of the desired relation on the right (see below Showing and editing dependent objects as relation) and (Using coupled lists).

|
Note: In lists, you can use the |

Basic attributes of parking lots
The basic attributes of the network element are shown in the upper area of the window and in the list of network objects for the particular network object type.
1. Make the desired changes:
| Element | Description |
|---|---|
| No. |
Unique number |
| Name |
Designation |
| At |
Position (Pos): Distance from start of the link or connector |
| Length |
Length of parking lot, at least 1 m |
| Type |
|
| Showing label |
|
|
Evaluation groups |
|
 If the option is not selected, the label for the parking lot is not displayed, even if you selected labeling for all parking lots. For parking lot labels, the following are available:
If the option is not selected, the label for the parking lot is not displayed, even if you selected labeling for all parking lots. For parking lot labels, the following are available: If the option is selected, the parking lot with this parking lot group will be included in the evaluation of parking lot groups
If the option is selected, the parking lot with this parking lot group will be included in the evaluation of parking lot groups Dyn. Assignment tab
These attributes are only relevant for parking lots of dynamic assignment (Defining parking lots for dynamic assignment).
Parking Spaces tab
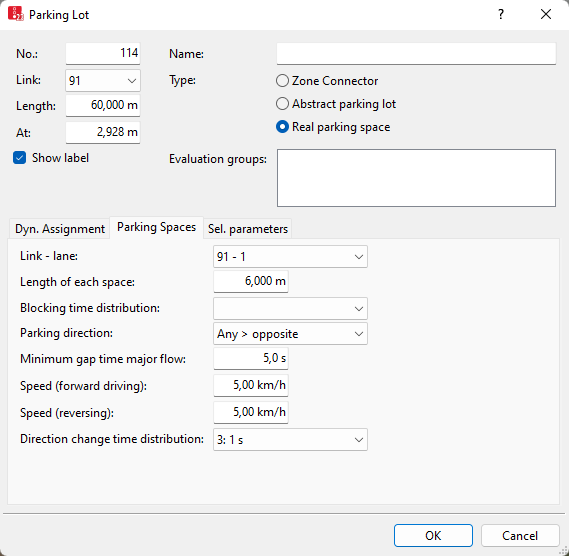
These attributes are only relevant for Real parking spaces.
| Element | Description |
|---|---|
|
Link - lane |
Number of the link and lane (Ln) on which the parking lot is located |
|
Length per space |
Length per parking space (LenPerSpc). The maximum length per space must not exceed the length of the parking lot. If the total length is not a multiple of the parking lot length, the remaining length is added to the end of the parking lot, but is not used by any vehicle. |
|
Blocking time distribution |
(BlockTmDistr, optional: The period of time that a vehicle blocks a lane during parallel parking on a multilane link before it finally comes to a stop in the parking space on the other lane. The blocking time begins when the vehicle pulling forward into a parking space first stops with the rear of the vehicle sticking out of the parking space onto the parallel lane, and it ends when the vehicle finally comes to a stop in the parallel-parked position. Not relevant for parking vehicles in diagonal and perpendicular parking spaces.
0: None: Blocking time is not considered for simulation. |
|
Parking direction |
ParkDir: Only for real parking spaces: Direction in which the vehicle is parking and leaving the parking space. For Any > opposite the following applies: The vehicle can pull forward or back into a perpendicular or diagonal parking lot in reverse direction. If the direction Forward > reverse is selected in Dynamic assignment and a zone is assigned to the parking lot, the following applies:
|
|
Minimum gap time major flow |
MinGapTmMajFl: Minimum gap time between two vehicles of the major flow, so that a vehicle may leave the parking space |
|
Speed (reversing) |
SpeedRvs: Desired speed of the vehicle backing into or out of a parking space. Default value 5 km/h, value range 0.001 to 9999 km/h. This value can have a significant impact on the traffic flow. |
|
Speed (forward driving) |
SpeedForw: Desired speed of the vehicle pulling forward into or out of a parking space. Default value 5 km/h, value range 0.001 to 9999 km/h. This value can have a significant impact on the traffic flow. |
|
Direction change duration distribution |
DirChgDurDist: Only relevant if the attribute Parking direction Forward > reverse is selected: Time distribution for the standstill duration when changing the driving direction during a parking maneuver. Default: time distribution 5 s (Using time distributions). If no value is specified, the vehicle remains in standstill for the duration of a time step. This value can have a significant impact on the traffic flow. |
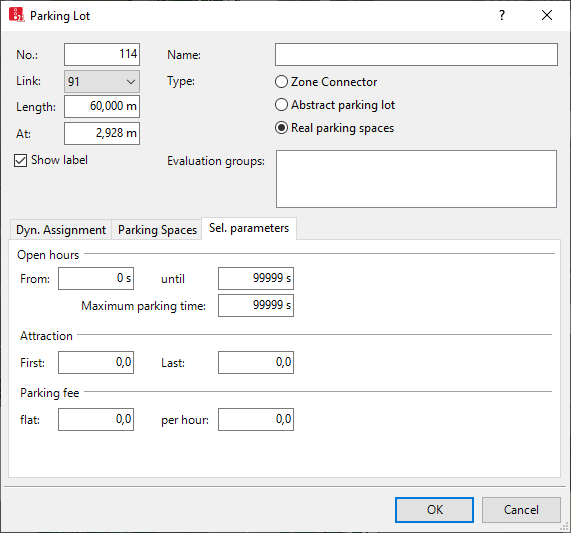
Sel. parameters tab
| Element | Description |
|---|---|
| Open hours |
From (OpenFrom), to (OpenUntil): Time span during which vehicles can enter the parking lot. Vehicles will not drive to the parking lot outside these hours. |
| Maximum parking time |
ParkTmMax:
|
| Attraction |
Attrac: The higher the value, the more attractive the parking lot or parking space. This allows you to account for features of the parking lot that are not explicitly available as an attribute. For Real parking spaces, you can create a linear change in the attractiveness across the parking spaces by entering different values for First and Last. To define a parking lot with attractive parking spaces in the middle of or at the edge of the parking lot, add two symmetrical parking spaces of the type Real parking spaces, with mirror-inverted values for Attraction. |
| Parking Cost |
ParkFee: only relevant for Zone Connector and Abstract parking lot:
|
The network object has additional attributes that you can show in the Attributes list. Among them are the following for example:
| Short name | Description |
|---|---|
|
CurrentOccup |
Currenty occupancy: Number of parking spaces with vehicles in Parked parking state. Does not contain a value, if for the parking lot, the type Zone connector is selected. Number of parking vehicles, if for the parking lot, the type Abstract parking lot is selected. |
|
CurReserv |
Current reservations: Number of free parking spaces that have already been allocated to vehicles on their way to the parking space. These vehicles have the parking state Driving to parking space. If the length of the vehicle requires the reservation of more than one parking space, this is included in the value. |
|
CurOverbook |
Current overbookings: Number of occupied parking spaces where vehicles are waiting for them to become available |
|
CurAvail |
Current availability: Number of parking spaces that are neither occupied nor reserved |
|
DetBlock |
Detect blockage: For real parking spaces only:
The option is selected by default. |
|
Zone |
Allocation of the zone number in the OD matrix to the parking lot. Multiple parking lots can belong to a zone. |
Showing and editing dependent objects as relation
The attribute and attribute values of this network object type are shown in the list on the left, which consists of two coupled lists.
1. In the list on the left, click the desired entry.
The list on the right contains attributes and attribute values of network objects, and/or base data allocated to the network object selected in the list on the left (Using coupled lists):
- Evaluation groups: Parking lot groups that are used for the evaluation of parking lot groups and to which the parking lots are allocated.
- Dyn assign des speed distributions (Defining parking lots for dynamic assignment)
- Vehicles (parking): Attributes of the vehicles that are currently parked in the parking lot
- Parking spaces: Parking space number of the parking spaces on the parking lot and number of the parking lot where the parking spaces are located
- Paths: Paths of path file from dynamic assignment If no paths are shown and you have performed dynamic assignment, you can use its path file to read in the paths. To do so, on the List shortcut menu, click the respective command (Attributes of paths).
2. On the list toolbar, in the Relations list, click the desired entry.
3. Enter the desired data.
The data is allocated.
Superordinate topic:
Information on editing:
Creating a car park in the network editor and defining attributes
