Editing the driving behavior parameter Lateral behavior
By default, in Vissim a vehicle uses the entire width of the lane. You can define in the driving behavior and parameters-lateral behavior, whether the vehicles in a lane can drive on the left, on the right or in the middle without specifying a lateral orientation. If the lane is wide enough and the attributes in the section Default behavior when overtaking vehicles on the same lane or on adjacent lanes allow for overtaking on the same lane, overtaking maneuvers on a single lane are also possible. If the maximum deceleration prevents the overtaking vehicle from braking in time, it overtakes the other vehicle if possible, even if this is not allowed by the driving behavior parameters Consider next turn and Minimum lateral distance. Improper overtaking therefore takes precedence over a collision.
In addition, these settings are used when the option Observe adjacent lane(s) is selected.
1. On the Base Data menu, click > Driving Behaviors.
The Driving Behaviors list opens. Some driving behavior parameter sets can be predefined.
You can edit all driving behavior parameters for lane change, lateral behavior and following behavior in the list or in tabs with the following steps.

|
Note: In lists, you can use the |

By default, you can edit the list (Using lists).
2. Right-click the entry of your choice.
3. On the shortcut menu, click Edit.
The Driving Behavior window opens.
4. Select the Lateral tab.
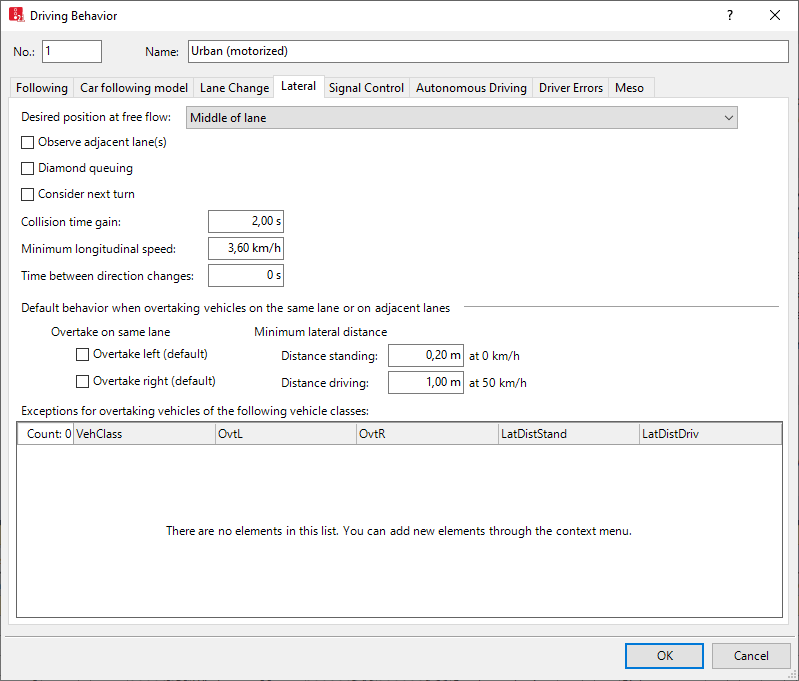
5. Make the desired changes:
| Element | Description | ||
|---|---|---|---|
|
Desired position at free flow |
Desired position at free flow (DesLatPos): Lateral orientation of a vehicle within its lane while it is in free traffic flow. If you change the traffic rules in the network settings, Vissim will change the attribute values Right to Left and Left to Right (Selecting network settings for vehicle behavior). |
||
|
Observe adjacent lanes |
ObsAdjLns:
|
||
|
Diamond queuing |
DiamQueu: |
||
|
Consider next turn |
ConsNextTurn: In case of non-lane-bound traffic enables a lateral behavior that accounts for another vehicle as follows: Option Consider next turn also considers the attribute Desired Direction of the next connector of the route of the vehicle (Attributes of connectors). If, for example, left has been selected for this attribute, the vehicle only passes another vehicle on the right if that vehicle turns at the same connector at the latest. The vehicle flashes when the following conditions are met:
|
||
|
Collision time gain |
Minimum collision time gain (MinKCollTimeGain): Minimum value of the collision time gain for the next vehicle or signal head, which must be reached so that a change of the lateral position on the lane is worthwhile and will be performed. The collision time is calculated based on the desired speed of the vehicle. The default value for collision time gain is two seconds. Smaller values lead to a livelier lateral behavior, since vehicles also have to dodge sideways for minor improvements. Default 2.0 s |
||
|
Minimum longitudinal speed |
Minimum longitudinal speed for lateral movement (MinSpeedForLat): Minimum longitudinal speed which still allows for lateral movements. The default value of 1 km/h ensures that vehicles can also move laterally if they have almost come to a halt already. |
||
|
Time between direction changes |
Lateral direction change - minimum time (Lateral behavior) (LatDirChgMinTm): the default value 0.0 s defines the minimum simulation time which must pass between the start of a lateral movement in one direction and the start of a lateral movement in the reverse direction. The larger this value is, the lower the lateral movements of the vehicles. These lateral movements only take place if overtaking on the same lane is permitted. Lateral movement for a lane change is not affected by this attribute. |
||
|
Default behavior when overtaking vehicles on the same lane or on adjacent lanes |
This applies for all vehicle classes, with the exception of the vehicles classes listed under Exceptions for overtaking vehicles of the following vehicle classes.
The minimum lateral distance is multiplied by the stochastic value z:
|
||
|
Exceptions for overtaking vehicles of the following vehicle classes |
Behavior for specific vehicle classes that deviates from the default behavior when overtaking vehicles on the same lane or on adjacent lanes. When modeling traffic that is not lane-bound, you can select vehicle classes which may be overtaken within a lane by vehicles of this driving behavior set. 1. Right-click in the list. 2. On the shortcut menu, click Add. A new row with default data is inserted. 3. Make the desired changes:
|
 If this option is selected, vehicles account for the position and lateral orientation of other vehicles on adjacent lanes and keep the
If this option is selected, vehicles account for the position and lateral orientation of other vehicles on adjacent lanes and keep the  If this option is not selected, vehicles on adjacent lanes are ignored even if they are wider than their lanes, except when they perform a lane change.
If this option is not selected, vehicles on adjacent lanes are ignored even if they are wider than their lanes, except when they perform a lane change.