歩行者の交錯エリアのモデリング
1. 次のネットワークオブジェクトが定義されていることを確認します。
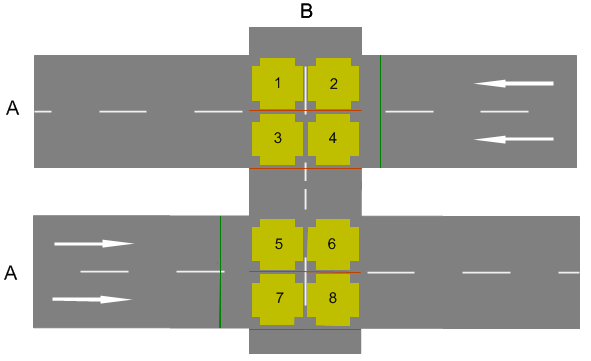
- 属性 [Is pedestrian area]-[歩行者エリアとして使用] が選択されている歩行者のリンク (歩行者リンクの定義):図のB。
- 属性 [Is pedestrian area]-[歩行者エリアとして使用] が無効になっている車両のリンク (リンクの属性):図のA、A
2. ネットワークオブジェクトサイドバーで、[Conflict Areas]-[交錯エリア] をクリックします。
Vissimは、逆方向に向かう2つの歩行者リンクにおいて受動的交錯エリアを作成します。デフォルトでは、受動的交錯エリアが黄色でマークされます。
図は、モデリングの例です。
3. 目的の優先ルールが表示されるまで、次の手順を繰り返します。
4. 目的の交錯エリアを右クリックします。
5. ショートカットメニューから、目的のエントリーをクリックします。
- [Set Status to 2 waits for 1]-[2が1を待つようにステータスを設定]:
- [Set Status to 1 waits for 2]-[1が2を待つようにステータスを設定]:
- [Set Status to Undetermined]-[ステータスを[未定]に設定]
歩行者のリンク上の交錯エリアには、常に、同じ優先ルール(歩行者が通行権を持つ、または通行権を渡す)があります。現在の優先ルール、現在の速度、希望速度に基づき、歩行者と車両はいつ交錯エリアを通過できるかを決定します。
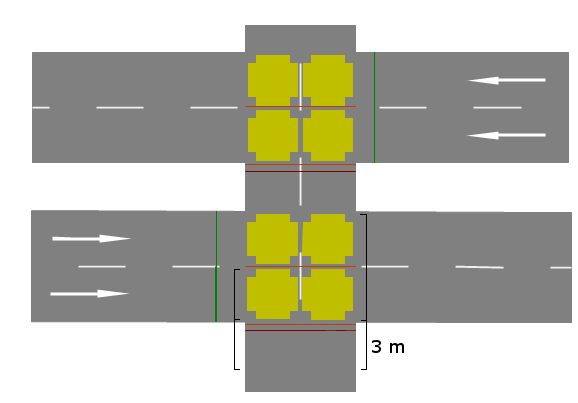
接近してくる車両が歩行者を認識するのは、交錯エリアに到達する少なくとも3m手前です。この距離は、歩行者または車両が待つ必要があるかどうかや、交錯エリアの属性値[Additional stop distance]-[追加停止距離]または[Rear gap(default)]-[リアギャップ(デフォルト)]に依存します (交錯エリアの属性):
- 歩行者を待たせる場合、次が適用されます: [3 m + additional stop distance]-[3 m + 追加停止距離]
- 車両を待たせる場合、次が適用されます: [max(3m, ([Rear gap (default)] + 0.5s) * 1.5m/s)]-[最大(3m, ([リアギャップ(デフォルト)] + 0.5s) * 1.5m/s)]
|
|
注意: 2つのリンクが狭い角度で交差する場合、道路を横切るための距離が長くなります。この場合、歩行者がリンクを横断するのにかかる時間も長くなります。交錯エリアが関係する2つのリンクの相対的な位置については、幾何学的分析が行われないため、次の車両が車線に到達したとき、歩行者はまだ車線を離れていない場合があります。 |

事例1:歩行者が車両に道を譲る
車両リンク(A1)を横断し、上図の(A1)の左のレーンにある交錯エリアに入ろうとする歩行者は、矢印の終了地点にある停止線上の計算最低速度を考慮する必要があります。
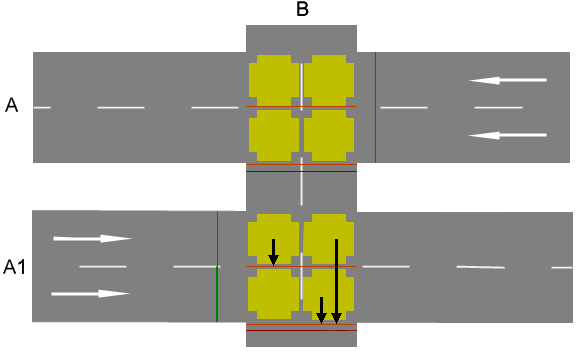
最低速度は停止線で動的に計算されます。最低速度つまり速い速度の歩行者は停止線を通過できますが、それ以外の歩行者は停止線の前で待機する必要があります。
車両が交錯エリアを通過する際に歩行者が車線上にいないよう、歩行者がリンク全体(ステージ単位)を渡り切ることができる場合にのみ、歩行者は車両リンクのある交錯エリアに入ります。歩行者の希望速度と車両の現在の速度がここで推定されます。以下の項目は考慮されません:
- まだネットワークに到達していない車両。
- 交錯エリアから75mにリンクの車線数をかけた距離以上離れた車両。たとえば、車両が加速したり、比較的短い距離でネットワークに入るなどで交錯エリアに侵入した後は、この条件を満たすことができなくなります。このような場合、歩行者は、車両の到達前までに渡りきれないと考えられる車両リンクの最初のレーンで待機します。
事例2:車両が待機しなければならない
歩行者リンクでは、交錯エリアから3 m上流側のエリアから交錯エリアの開始地点までが、交錯エリアに接近する歩行者の「感知器エリア」として使用されます (歩行者用の感知器のモデリング)。交錯エリア内の歩行者は常に考慮の対象となります。
交錯エリアに入ってくる歩行者はいないはずの場合は、歩行者または歩行者のグループ間のギャップが接近する車両に転送されます。このように、車両は状況に応じて対応できます。
親見出し:
