交錯エリアの属性
交錯エリアの属性は、交錯エリアに近づく車両の運転挙動に影響します。これは、特定の交通状況において、車両が予定やそれに従って運転挙動を変える場合があるためです。そこから生じる状況は、定義された属性値とは異なることがあります。これは特に、2台の車両の前後に生じるギャップに対して当てはまります。
ネットワークオブジェクトタイプ [Conflict Areas]-[交錯エリア] のネットワークオブジェクトリストでは、交錯エリアのすべての属性と属性値を編集できます (リストを開く)、(リストのセルの選択)。

|
注意: リストでは、 |

1. 必要な変更を加えます。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[No]-[番号] |
固有番号 |
|
Link1, Link2 |
Link 1, Link 2: 交錯エリアのあるリンクの番号と名前 |
|
VisibLink1、 VisibLink2 |
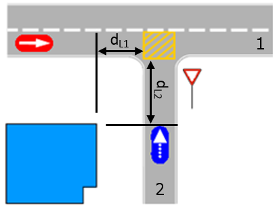
リンク1視認性、リンク2視認性:接近する車両が別のリンク上の車両を「視認」できる最大距離。車両が、交錯エリアからまだ遠く離れた非優先リンク上にいるかぎり、交錯エリアのできるだけ近くで停車する予定をたてます。車両の動きを維持するために、1 m未満の値は避けてください。 図では、リンク2の一番下にいる青色の車両が、リンク1にある青色の建物ごしに、赤い車両の場所(左側)を完全に「視認」できる場所に到達しています。つまり、リンク2の視認性 = dL2となります。
|
|
[Status]-[ステータス] |
カラーによる通行権の識別:
|
|
FrontGapDef FrontGap |
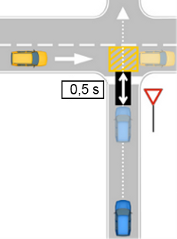
[Front gap (default)]-[フロントギャップ(デフォルト)]:
下図は、現在の状況(不透明な車両-上流)と将来的な状況(半透明な車両-上流)を示しています。将来的な状況では、メジャー交通流の車両が交錯エリアを出たところです。この時までの[Front gap]-[フロントギャップ]は、マイナー交通流の車両が空の交錯エリアに到達するのに要する時間とみなされます(この場合:0.5s)。
|
|
RearGapDef RearGap |
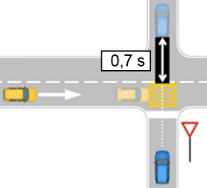
[Rear gap (default)]-[リアギャップ(デフォルト)]:タイプ[Crossing]-[交差]の場合のみ。
図は、メジャー交通流の車両が交錯エリアに到達した後の、現在の状況(色の濃い車両が上流)と将来の状況(薄い半透明の車両が上流)を示しています。リアギャップは、マイナー交通流の車両が交錯エリアを出てからの経過時間(ここでは0.7秒)として評価されます。
|
|
MinGapBlockDef MinGapBlock |
[Minimum gap blocking (default)]-[最短ギャップブロック(デフォルト)]:属性 [Avoid blocking the major flow]-[メジャーフローのブロック回避] が選択されておらず、それによって譲る側の車両が交錯エリアに進入し、メジャーフローをブロックする可能性がある場合にのみ適用されます。
|
|
MesoCriticGap |
[Meso critical gap]-[メソクリティカルギャップ]:[Meso turn conflicts]-[メソ回転競合] リスト、または結合リスト [Nodes]-[ノード] - [Meso turn conflicts]-[メソ回転競合] でこの値を編集します(メソターン交錯の属性)、(ノードの属性)。 |
|
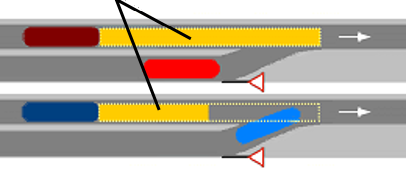
SafDistFactDef |
[Safety distance factor]-[安全距離ファクター]:タイプ [Merge]-[合流] の場合のみ:この係数をメジャー交通流の車両の通常の目的の安全距離と掛け合わせることで、譲る側交通流の車両がタイプ [Merge]-[合流] の交錯エリアに完全に入っっている時に保たなければならない最小距離を決定します。 右側の [Gaps]-[ギャップ] リストに、車両クラスごとの安全距離係数を入力できます。 下図は、どちらも同じ状況ですが、係数が、上は1.0、下は0.5となっています。このため、赤色の車両(上)が停止しなければならないタイミングでも、青色の車両(下)は交錯エリアに進入できています。 この図では、安全距離に関連する部分が黄色でハイライト表示されています。
|
|
AddStopDist |
[Additional stop distance]-[追加停止距離]: 待つ必要のある車両または歩行者のみに関連します。歩行者または車両が交通権を譲らなければならない場合、交錯エリアの上流で待機しなければならない距離(メートル)。その結果、車両または歩行者は、交錯エリアからさらに離れて停止する必要があり、したがって、このエリアを通過するために移動しなければならない距離が長くなります。デフォルト値 0 m。停止線の位置は、進行方向における交錯エリアの開始地点のすぐ上流です。 追加停止距離は、歩行者または車両が道を譲らなければならない場合に待機しなければならないリンクの上流位置を示します。停止線は、交錯エリアの通常の停止線の上流に配置できます。 |
|
ObsAdjLns |
[Observe adjacent lanes]-[隣接車線の監視]: このオプションにより、シミュレーション速度は低下します。 |
|
AnticipRout |
[Anticipate routes]-[予想ルート]:通行権を持つ車両のルートを考慮して、譲る側となる車両のパーセンテージ。これらはメジャー交通流に乗って近づいてきており、さらに上流へターンします。したがって、これらの車両が交錯エリアに到達することはありません。たとえば、優先車両の方向指示信号の設定に基づいて、優先車両が交錯エリアに到達する前にラウンドアバウトから出ることは確かなので、実際にラウンドアバウトに進入する車両のパーセントを決定するために使用することができます。値域 0~100 %、デフォルト値 0 % |
|
AvoidBlockMinor |
[Avoid blocking the minor flow]-[マイナ交通流のブロック回避]:通行権のある車両が選択されたパーセンテージに属する場合、その車両は交錯エリアの下流で利用可能なスペースをチェックします。次の条件下では交錯エリアに進入しません。
|
|
AvoidBlockMajor |
[Avoid blocking the major flow]-[メジャー交通流のブロック回避]
例:車両経路と、多くの狭い車線と歩行者が優先権を持つ非常に幅の広い歩行者経路との間の長い交錯エリアをモデリングします。このオプションを無効化すると、車両が、交錯エリア、およびその後ろに近接する他の交錯エリアを一気に通過できるタイミングまで待たずに、交錯する車線に入り、横切ることができるようになります。 |
 このオプションが選択されている場合、合流時の交錯では、譲る必要のあるマイナー交通流の流入車両は、交錯車線に変更したいメジャー交通流の車両を考慮します。すでに車線変更を開始しており、交錯のある車線への変更を希望する車両は考慮されます。まだ車線変更を開始していない車両は考慮されません。
このオプションが選択されている場合、合流時の交錯では、譲る必要のあるマイナー交通流の流入車両は、交錯車線に変更したいメジャー交通流の車両を考慮します。すでに車線変更を開始しており、交錯のある車線への変更を希望する車両は考慮されます。まだ車線変更を開始していない車両は考慮されません。 このオプションが選択されていない場合、譲る側の車両は、通行権のある車両によってブロックされているせいで追従車線の交錯には進入できなくても、交錯エリアに入り、その中で停止することができます。この場合、譲る側の車両がメジャー交通流をブロックする可能性があります。譲る側の車両では、属性
このオプションが選択されていない場合、譲る側の車両は、通行権のある車両によってブロックされているせいで追従車線の交錯には進入できなくても、交錯エリアに入り、その中で停止することができます。この場合、譲る側の車両がメジャー交通流をブロックする可能性があります。譲る側の車両では、属性 このネットワークオブジェクトは、[Attributes]-[[属性] リストにある追加の属性を持ちます。たとえば、次のような属性がこれに該当します。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
| コンフリクト種別-自動決定 |
ConflTypDetmAuto:
|
| コンフリクト種別(手動) |
ConflTypMan:コンフリクト種別を選びます(交錯エリアの使用)。
コンフリクト種別は交錯エリアのすべての車線に対して有効です。交錯エリア内で異なるコンフリクト種別を選択することはできません。 |
関係としての依存型オブジェクトの表示と編集
このネットワークオブジェクトタイプの属性と属性値が左側のリストに表示されます。これは、2つの結合リストで構成されています。
1. 左側のリストで、目的のエントリーをクリックします。
右側のリストには、左側のリストで選択されたネットワークオブジェクトに割り当てられたネットワークオブジェクトやベースデータの属性と属性値が示されます (結合リストの使用)。
- 時間ギャップ [s] の定義
属性の詳細は、上記を参照してください。
