運転挙動のパラメータ [Lane change behavior]-[車線変更挙動] の変更
1. [Base Data]-[ベースデータ] メニューから、[Driving Behaviors]-[運転挙動] をクリックします。
[Driving Behaviors]-[運転挙動] リストが開きます。一部の運転挙動のパラメータセットは事前に定義しておくことができます。
デフォルトでは、リストを編集できます (リストの使用)。
次の手順を使用すれば、リストやタブにある車線変更、横方向挙動、追従挙動のすべての運転挙動のパラメータを変更できます。

|
注意: リストでは、 |

2. 選択するエントリーを右クリックします。
3. ショートカットメニューで、[Edit]-[編集] をクリックします。
[Driving Behavior]-[運転挙動] ウィンドウが開きます。
4. [Lane Change]-[車線変更] タブを選択します。
[Driving Behaviors]-[運転挙動] リストまたはメニュー [Base Data]-[基本データ] > [Driving Behaviors]-[運転挙動] から定義済みのネットワークオブジェクトを編集できます。
5. 必要な変更を加えます。
| [Element]-[エレメント] | [Description]-[説明] | ||
|---|---|---|---|
|
[General behavior]-一般的な挙動 |
[Lane change rule]-[車線変更ルール](LnChgRule):
[Cooperative lane change]-[協調型車線変更] の設定を使用すると、選択したオプションに関係なく、一般的な挙動をより現実に近くモデリングすることができます。 |
||
|
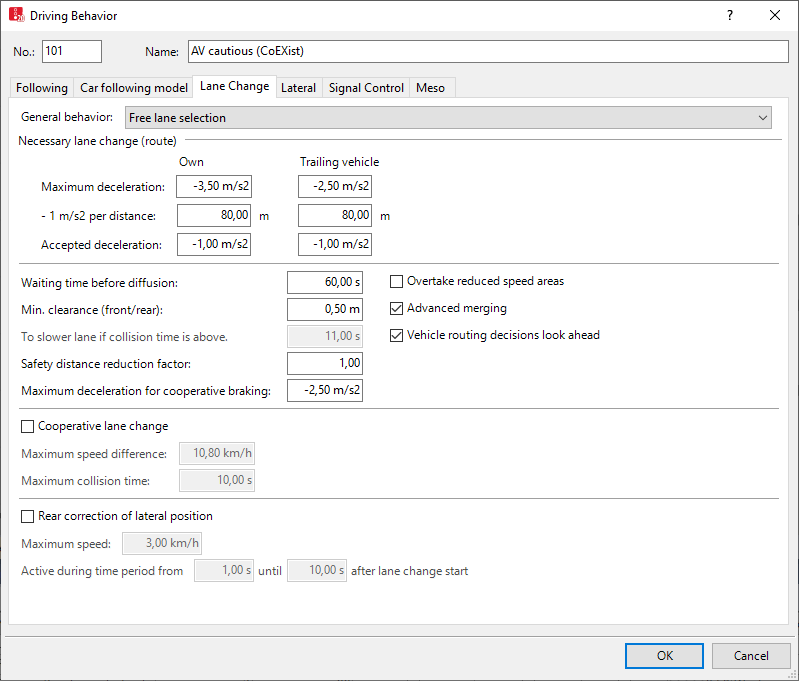
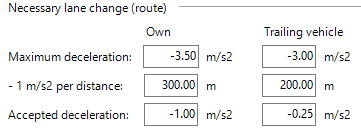
[Necessary lane change (route)]-[必要な車線変更(経路)] |
|
||
たとえば、次のパラメータの場合、次に示すような曲線が生成されます。
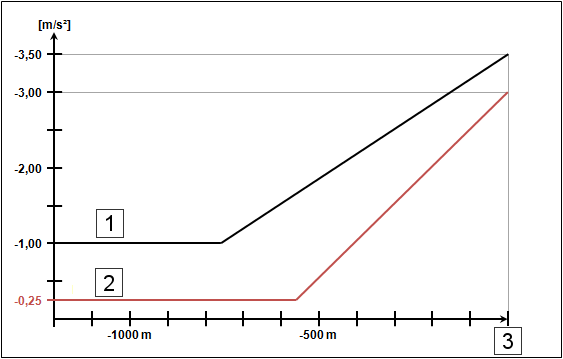
凡例:
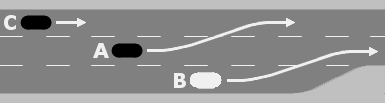
1:黒色の線:車線変更者(自身)
2:赤色の線:後続車両
3:緊急停止距離
| [Element]-[エレメント] | [Description]-[説明] | |
|---|---|---|
|
[Diffusion time]-[拡散時間] |
DiffusTm:車線変更が必要な場合に、緊急停止距離で車両が待機できる最長時間。この時間に達すると、車両がネットワークから削除され、同時に、警告が*.errファイルに書き込まれ、[Messages]-[メッセージ] ウィンドウに表示されます。 |
|
|
[Min. clearance (front/rear):]-[最小クリアランス(前後)]: |
[Minimum clearance]-[最小クリアランス]( MinHdwy):車線変更を行うために必要となる、車線変更後の2台の車両間の最小距離(デフォルト値は0.5 m)。通常の交通流での車線変更では、速度に応じて安全距離を維持できるように、車両間に必要な最小距離が長くなる場合があります。 |
|
|
[To slower lane if collision time is above]-[衝突時間を超えた場合低速車線へ] |
[Free driving time]-[自由運転時間](FreeDrivTm):[Slow lane rule]-[低速車線ルール] または [Fast lane rule]-[高速車線ルール] の場合のみ:前の車両までの最短距離を定義します(秒単位)。これは、追い越し車両が低速車線に切り替えられるように、低速車線に設定する必要があります。 |
|
|
[Safety distance reduction factor:]-[安全距離の短縮要因:] |
[Safety distance reduction factor (lane change)]-[安全距離減少ファクター(車線変更)] (SichAbstFsWechs)は、各車線変更において考慮されます。次のパラメータを考慮します。
車線変更中は、次の乗算で得た値までVissimが安全距離を短縮します。 元の安全距離 • 安全距離の短縮要因 デフォルト値の0.6の場合、安全距離が40%短縮されます。車線変更が完了すると、元の安全距離が再び考慮されます。 |
|
|
[Maximum deceleration for cooperative braking]-[協調ブレーキングの最大減速] |
[Maximum cooperative deceleration]-[最大協調減速](CoopDecel):前の車両Bが自身の車線に車線変更できるように、後続の車両Aが協調ブレーキを実行する程度を指定します(デフォルト値-3m/s2)ここでは、次の内容が適用されます。
協調ブレーキの際には、次の値を使用して車両が減速します。
|
|
|
[Overtake reduced speed areas]-[追い越し減速エリア] |
OvtRedSpeedAreas: このオプションはデフォルトでは選択されていません。
|
|
|
[Advanced merging]-[高度な合流] |
AdvMerg:このオプションは、新たに作成されたネットワークの運転挙動パラメータセットにデフォルトで選択されます。このオプションは、ルートに沿った次のコネクタへの車線変更が必要な場合に考慮されます。
車両Aに車線変更が必要であり、目的の隣接車線の前方を走行する車両Bがほぼ同じ速度か、または自身よりもやや速い(-1.0 m/s < dv < 0.1 m/s)速度であると認識した場合、このオプションが選択されていると、Aはわずかに減速(0.5 m/s²単位)し、Bの背後のギャップに移動します。
車両Cの背後の車両Aが、隣接車線前方の車両BがAの車線に変更しようとしていることを感知した場合、このオプションを使用すれば、BがCの下流にいるときにAも協調ブレーキを実行します。
車両Bが、車両Aの前方に隣接する車両であると仮定し、 AはBを合流させるつもりだが、BはCの下流側(Aの前方)を自車線で走行しているとします。このとき、車両AはBの合流を許可することを忘れていましたが、結果的に、車両Aは他の車両に自身の車線への変更を速やかに許可することができます。
車両Aが他の車線の前方を走行する車両Bに合流を許可しようとしたにもかかわらずBが車線を変更せず、その間にAがBを追い越した場合、このオプションを使用すると、車両AはBの合流を許可する必要があったことを無視することができます。そのため、車両Aは他の車両に自身の車線への変更を速やかに許可することができます。
|
|
|
[Vehicle routing decisions look ahead]-[車両ルート決定前方] |
VehRoutDecLookAhead: |
|
|
[Cooperative lane change]-[協調型車線変更] |
CoopLnChg: 車両Aは、隣車線を走る先行車両Bが車線Aへの変更を希望していることを確認すると、車両Bの車線変更を容易にするため、車両Aは自ら隣車線への車線変更を試みます。例えば、車両Aは、車両Bが合流車線から右車線に左折したいときに、右車線から左車線に切り替えます。
車両Aの車線変更時の挙動は、遠方のコネクターに起因して車線変更する必要があったかのようになります。車両Aは、必要な車線変更のパラメータと合わせて、自身の[Maximum deceleration]-[最大減速度] と新しい車線の後続の車両Cの減速を受け入れます。 次の条件を満たす場合は、車両Aは協調型車線変更を行いません。
|
|
|
[Rear correction of lateral position]-[横方向位置のリア補正] |
RearCorr:車線変更が [[Maximum speed]-[最大速度] ボックスで指定した速度より遅い速度で実行されると、車両のリアエンドが横に移動します。リア補正はこの動きを補正するものです。それにより、元の車線の角度ではなく、車線変更終了時の車線中央に合わせて車両位置が調整されます。車両が停止しているときでも、リア補正は完全に行われます。 背面補正は容量に影響します。 リア補正は、運転挙動パラメータ[Lateral behavior]-[横方向挙動]で[Observe adjacent lane]-[隣接する車線を観察]オプションが選択されている場合にのみ実行されます (運転挙動のパラメータ [Lateral behavior]-[横方向の挙動] の編集)。
また、この属性[Active during time period from]-[アクティブとなった期間の開始時点]および[to]-[から]の期間に活動]によって、後方修正の速度も決定されます。 |
|

 このオプションを選択すると、減速エリアのすぐ上流にいる車両が自由車線変更する場合があります
このオプションを選択すると、減速エリアのすぐ上流にいる車両が自由車線変更する場合があります  オプションを選択しない場合は、減速エリアのすぐ上流で車両が自由車線変更を開始することはありません。また、新しい車線の減速エリアは完全に無視されます。
オプションを選択しない場合は、減速エリアのすぐ上流で車両が自由車線変更を開始することはありません。また、新しい車線の減速エリアは完全に無視されます。