運転挙動パラメータ自動車追従モデルの編集
1. [Base Data]-[ベースデータ] メニューから、[Driving Behaviors]-[運転挙動] をクリックします。
[Driving Behaviors]-[運転挙動] リストが開きます。一部の運転挙動のパラメータセットは事前に定義しておくことができます。
デフォルトでは、リストを編集できます (リストの使用)。
次の手順を使用すれば、リストやタブにある車線変更、横方向挙動、追従挙動のすべての運転挙動のパラメータを変更できます。

|
注意: リストでは、 |

2. 選択するエントリーを右クリックします。
3. ショートカットメニューで、[Edit]-[編集] をクリックします。
[Driving Behavior]-[運転挙動] ウィンドウが開きます。
4. [Car following model]-[自動車追従モデル] タブを選択します。
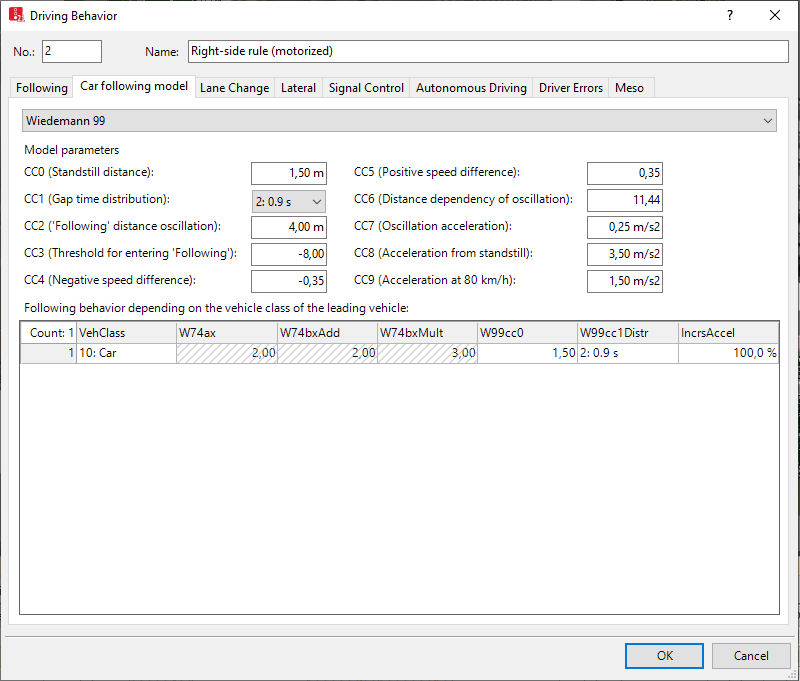
5. 目的のデータを入力します。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[List box]-[リストボックス] |
車両従挙動の自動車追従モデル。選択した自動車追従モデルに応じて、[Model parameters]-[モデルパラメータ] が変化します。
|
|
モデルパラメータ |
選択した自動車追従モデルごとに異なるパラメータが表示されます (Wiedemann 74モデルパラメータの定義)、(Wiedemann 99モデルパラメータの定義)。これらのモデルパラメータもまた飽和交通量に影響します。 |
「Defining following behavior based on the vehicle class of the preceding vehicle]-[先行車の車両クラスに基づいた後続車の挙動の定義]
後続車のモデルパラメータは、先行車の車両クラスに応じて、Wiedemann 74およびWiedemann 99を基準にすることができます。これは、定義されたすべての車両クラスに対して行うことができます。追従挙動は、車両が車両インプットに入った瞬間から有効になります。
1. 複数の車両クラスに基づいてモデルパラメータを変更するには、希望する車両クラスごとに以下の手順を順番に実行します。
2. セクション[Following based on vehicle class of preceding vehicle]-[先行車の車両クラスに基づいて追従]を右クリックします。
3. ショートカットメニューから、[Add]-[追加] をクリックします。
新しい行が挿入されます。この行には、最も数字の小さい車両クラスのモデルパラメータが示されます。後者はまだ表示されていません。追従挙動に関連するすべてのWiedemann 74およびWiedemann 99モデルパラメータが表示されます (Wiedemann 74モデルパラメータの定義),(Wiedemann 99モデルパラメータの定義)。[Increased acceleration]-[増加した加速度]の列では、先行車が加速したときに車両が後退するか加速するかを定義できます (運転挙動のパラメータ [Following]-[交通流] 挙動の編集)。
選択されていない自動車追従モデルのモデルパラメータは、線影で示されています(つまり関係なし)。
4. 線影のないボックスに車両の以下の挙動に必要な属性値を入力します(デフォルト値と異なる場合)。
