Wiedemann 74モデルパラメータの定義
このモデルは、Wiedemannの1974年の自動車追従モデルを改良したバージョンです。
次のパラメータを使用できます。
| パラメータ | [Description]-[説明] |
|---|---|
| [Average standstill distance (w74ax)]-[平均停止距離(w74ax)] |
(ax): 静止している2台間の平均希望車間距離の基準値。公差は-1.0mから+1.0mの範囲内にあります。0.0m前後で正規分布し、標準偏差は0.3mです。 これは axにおける「確率的分散」につながります。デフォルトは2.0 m。 |
| [Additive part of safety distance (w74bxAdd)]-[安全距離の付加部分(w74bxAdd)] |
bxadd:目的の安全距離 dの計算に使用される値。時間要件の値を調整できます。デフォルトは2.0 m。 |
| [Multiplicative part of safety distance (w74bxMult)]-[安全距離の乗算部分(w74bxMult)] |
(bxmult):目的の安全距離 dの計算に使用される値。時間要件の値を調整できます。大きな値=安全距離の分布(標準偏差)が拡大。デフォルトは3.0m |
目的の距離dは次の式で求められます。
ここでは、
Ax:: 静止距離の 「確率的分散」基準値(上記表を参照)
V:: 車速[m/s]、最小値0.1。その結果、実際の静止距離は、追加の「確率的分散」 axよりも約0.316m長くなります。
z:範囲の値 [0.1]。通常は、0.5を中心にして分布し、標準偏差は0.15
Wiedemann 74モデリングパラメータを使用した飽和交通量率の定義
飽和交通量率は、1時間あたりにリンク上を自由に走行できる車両の数を定義します。信号制御で作成された影響や渋滞は考慮されません。飽和交通量率は、速度、HGVの割合、車線数といった他のパラメータにも左右されます。
飽和率を定義する場合は、パラメータ [Additive part of safety distance]-[安全距離の付加部分] と [Multiplicative part of safety distance]-[安全距離の乗算部分] を組み合わせます。これらのパラメータを使用してモデルを観察データに採用する場合は、経験のあるユーザーが実行してください。
|
|
注意: グラフは、Vissimで使用したサンプルで計算した飽和交通量率を示しています。別のネットワークを使用すると、グラフの示す値が変化します。 |

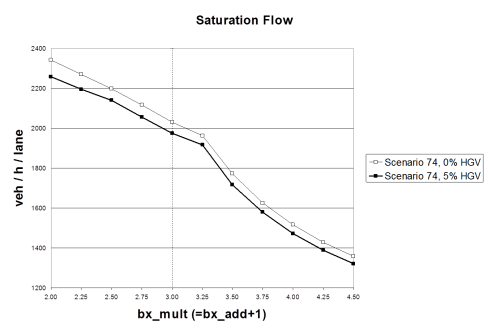
例えば、シナリオ74は次のパラメーターを使用して作成されました。
- 単一車線のリンク
- 速度分布は48~58 km/hです
- デフォルトの運転挙動。ただし、x軸に従って変化するパラメータbxadd([Additive part of safety distance]-[安全距離の加算部分])とbxmult([Multiplicative part of safety distance]-[安全距離の乗算部分])を除く。この例では、次の式が適用されています。bxadd = bxmult-1
- シミュレーション1秒あたりに1回の時間ステップ
親見出し:
