Wiedemann 99モデルパラメータの定義
このモデルはWiedemannの1999年の自動車追従モデルをベースにしています。
次のパラメータを使用できます。
| パラメータ | 単位 | [Description]-[説明] |
|---|---|---|
|
CC0 |
m |
[Standstill distance]-[停止距離]:2台の車両間の目的の停止距離です。確率的変動はありません。 静的障害物の上流の挙動は、属性 [Standstill distance in front of static obstacles]-[[静的障害物までの停止距離] を使用して定義できます (運転挙動のパラメータ [Following]-[交通流] 挙動の編集)。 |
|
CC1 |
s |
[Gap time distribution]-[ギャップ時間分布]: 停止距離に加えて、運転手が維持したいギャップ時間(秒)を抽出した時間分布。 速度vにおいて、望ましい安全距離は次のように計算されます: dx[safe]-[安全] = CC0 + CC1 • v 大容量では、この分布が容量の支配的な要因となります。 |
|
CC2 |
m |
['Following' distance oscillation]-[追従距離振動]: 他の車両に追従する運転手が意図的に接近する前に許容する望ましい安全距離を超えた最大追加距離。 この値が例えば10mに設定されている場合、距離はその間を振れ幅とします: dx[safe]-[安全] und dx[safe]-[安全] + 10 m デフォルト値は4.0mであり、非常に安定した追従挙動になります。 |
|
CC3 |
s |
[Threshold for entering ‘BrakeBX’]-[‘BrakeBX’入力しきい値]: 速度が一定と仮定した場合、減速開始時に先行する低速車との安全距離が最大になるまでの時間(マイナスの値)。 |
|
CC4 |
m/s |
[Negative speed difference]-[マイナスの速度差]: 追従プロセスにおいて、遅い先行車両と比較した相対速度のしきい値を低くする(マイナスの値)。 絶対値が小さいほど、先行車に近い速度を採用することになります。 |
|
CC5 |
m/s |
[Positive speed difference]-[プラスの速度差]: 追従プロセスにおいて、より速い先行車と比較した相対的な制限速度(プラスの値)。 推奨値: CC4の絶対値 マイナスの値は、より先行車に近い減速速度を採用することになります。 |
|
CC6 |
1/(m • s) |
[Distance impact on oscillation]-[振動への距離の影響]: 追従時の相対速度の限界に対する距離の影響:
|
|
CC7 |
m/s2 |
[Oscillation acceleration]-[加速振動]: 追従プロセスにおける加速振動。 |
|
CC8 |
m/s2 |
[Acceleration from standstill]-[停止状態からの加速]: 停止状態からの発進時の加速。車両タイプに割り当てられた希望最大加速機能によって制限されます。 |
|
CC9 |
m/s2 |
[Acceleration at 80 km/h]-[80 km/hでの加速]: 80km/hでの加速は、車両タイプに割り当てられた希望加速機能と最大加速機能によって制限されます。 |
|
|
注意:
以下は車両にのみ適用されます: zは使用される最大加速度に加えられます: z = 区間[0.1]からの値で、0.5で正規分布し、標準偏差は0.15です。例えば、車両が希望の速度に非常に近い場合や、前方に遅い車両があると認識した場合など、他の要因が関係する場合、車両の加速度は最大加速度より小さくなることがあります。
|

Wiedemann 99モデリングパラメータを使用した飽和交通量率の定義
飽和交通量率は、1時間あたりにリンク上を自由に走行できる車両の数を定義します。信号制御で作成された影響や渋滞は考慮されません。飽和交通量率は、速度、HGVの割合、車線数といった他のパラメータにも左右されます。
車両追従モデルWiedemann 99では、パラメータCC1が安全距離と飽和交通量率に大きく影響します。以下に例として示すシナリオは次の前提に基づいたものです。
- 車両追従モデルWiedemann 99、x軸に沿って変化するCC1以外はデフォルトのパラメータを使用
- シミュレーション1秒あたりに1回の時間ステップ
次のグラフの主な特性:
|
[Scenario]-[シナリオ] |
[Right-side rule]-[右側ルール] |
[Lane]-[車線] |
[Speed cars*]-[自動車速度*] |
[Speed HGV*]-[HGV速度*] |
[% HGV]-[HGVの割合(%)] |
|---|---|---|---|---|---|
|
99-1 |
なし |
2 |
80 |
該当なし |
0% |
|
99-2 |
なし |
2 |
80 |
85 |
15% |
|
99-3 |
あり |
2 |
80 |
該当なし |
0% |
|
99-4 |
あり |
2 |
80 |
85 |
15% |
|
99-5 |
あり |
2** |
120 |
該当なし |
0% |
|
99-6 |
あり |
2 |
120 |
85 |
15% |
* Vissimのデフォルト設定
** 車線2はHGVの通行不可
|
|
注意: グラフは例示的な飽和交通流量の計算値を示したものです。別のネットワークを使用すると、グラフの示す値が変化します。 |
例: 飽和交通流量のグラフ シナリオ99-1~99-6
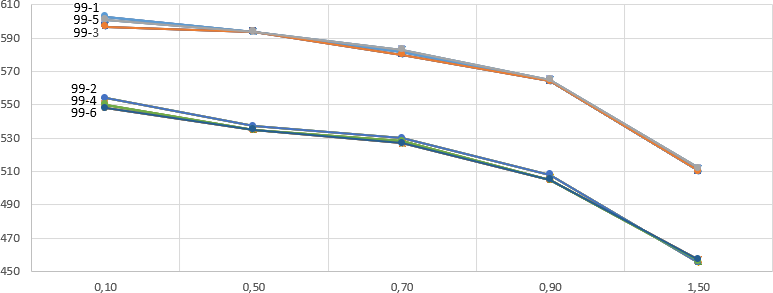
水平X軸: 変動CC1:0.1~1.5
垂直Y軸: Veeh/h/車線
親見出し:
