Редактировать параметр манеры езды Смена полосы движения
1. Выберите в меню Базовые данные > Манера езды.
Откроется список Манера езды. Некоторые наборы параметров манеры езды можно определить предварительно.
По умолчанию можно редактировать список.
Можно изменять все параметры манеры езды в списке или во вкладках, выполняя следующие шаги.

|
Примечание: Можно показать и скрыть в списках столбцы со значениями атрибутов, используя символ |

2. Нажмите правой кнопкой мыши на желаемую запись.
3. Выберите в контекстном меню запись Редактировать.
Откроется окно Манера езды.
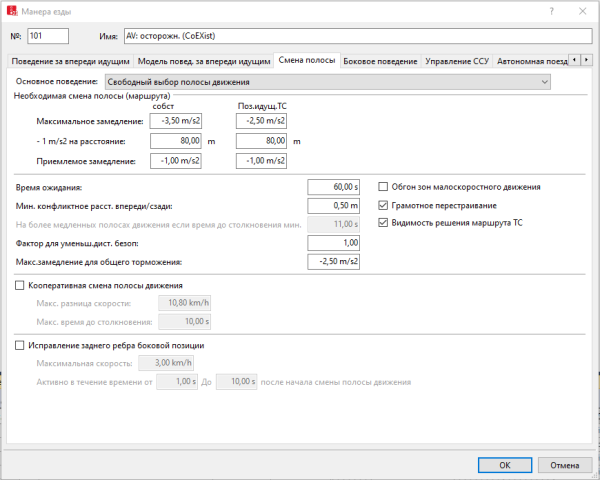
4. Выберите вкладку Смена полосы движения.
Уже определенные объекты сети можно редактировать в списке Манера езды или через меню Базовые данные > Манера езды.
5. Выполните желаемые настройки:
| Элемент | Описание | ||
|---|---|---|---|
|
Основное поведение |
Поведение при смене полос движения (ПоведСмПД).
Вне зависимости от выбранной опции, основные принципы поведения можно более реалистично моделировать при помощи настроек в опции Кооперативная смена полосы движения. |
||
|
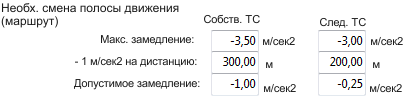
Необходимая смена полосы движения (Маршрут) |
|
||
Например, следующие параметры образуют представленный ниже ход кривой:
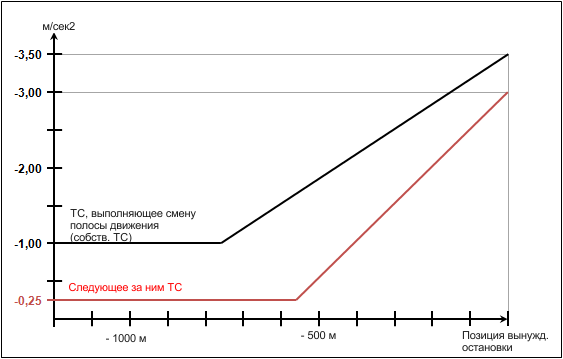
Легенда:
1, черная линия: ТС, выполняющее смену полосы движения (собственное).
2, красная линия: позади идущее ТС.
3: позиция вынужденной остановки.
| Элемент | Описание | |
|---|---|---|
|
Время ожидания |
ВрОж: максимальное время, в течение которого транспортное средство может ждать на позиции вынужденной остановки до возможности смены полосы движения. После достижения этого времени транспортное средство выводится из сети, одновременно с чем предупреждение вносится в файл *.err и выдается в окне Сообщения. |
|
|
Мин. конфликтное расст. впереди/сзади |
Минимальное конфликтное расстояние (МинКонфРасст): минимальное расстояние, которое должно существовать между двумя транспортными средствами после смены полосы движения, чтобы это произошло, по умолчанию 0,5 м. В зависимости от скорости движения, для смены полосы движения в транспортном потоке может потребоваться большее минимальное расстояние между транспортными средствами. |
|
|
На более медленных полосах движения если время до столкновения мин. |
Свободное время движения (СвобВрДвиж): только при правостороннем движении или левостороннем движении: определяет минимальное расстояние в секундах, которое должно существовать до впереди идущего ТС на более медленной полосе, чтобы транспортное средство, совершающее обгон, въехало на более медленную полосу. |
|
|
Фактор для уменьшения дист.безоп. |
Для каждой смены полосы движения будет учитываться Фактор дистанции безопасности (смена полос движения) (ДистБезопСмПД). Он касается следующих параметров:
Во время смены полосы движения Vissim сокращает дистанцию безопасности на значение, которое получается путем умножения следующих параметров. Первоначальная дистанция безопасности • Фактор для уменьшения дист. безоп. При значении по умолчанию 0,6 дистанция безопасности сокращается на 40 %. Как только смена полосы движения будет завершена, снова будет учитываться первоначальная дистанция безопасности. |
|
|
Максимальное замедление для общего торможения |
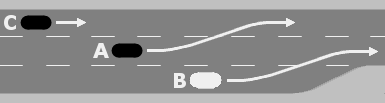
Максимальное кооперативное замедление (КоопЗамедл): указывает, насколько кооперативно тормозит позади идущее ТС A, чтобы позволить впереди идущему транспортному средству B перестроиться на собственную полосу движения, значение по умолчанию составляет 3 м/с2. При этом действует следующее.
При кооперативном торможении транспортное средство тормозит со следующими значениями:
|
|
|
Обгон зон малоскоростного движения |
ОбгЗонМалоСкорДвиж: опция по умолчанию не выбрана.
|
|
|
Грамотное перестраивание |
ГрамПерестр: эта опция по умолчанию выбрана в наборе параметров манеры езды новых введенных сетей. Опция учитывается для каждой необходимой смены полосы движения на следующий соединяющий отрезок маршрута.
Если транспортное средство A должно сменить полосу движения и распознает, что соседнее впереди идущее ТС B на конечной полосе движения имеет, например, идентичную скорость или едет лишь незначительно быстрее (-1,0 м/с < dv < 0,1 м/с), то A тормозит слегка (0,5 м/с²), чтобы попасть в свободное пространство позади B, если эта опция выбрана.
Если ТС A с впереди идущим ТС C распознает, что соседнее впереди идущее ТС B намеревается перестроиться на полосу движения A, то с помощью этой опции А может кооперативно тормозить и в том случае, если B находится ниже по направлению движения от С.
Если соседнее впереди идущее ТС B, которое транспортное средство A намеревалось пропустить, между тем уже находится ниже по направлению движения впереди идущего ТС C от A на собственной полосе, то при использовании этой опции A игнорирует, что для B должен быть обеспечен переход на нужную ему полосу движения. Таким образом, A может заново пропускать на собственную полосу также и другие транспортные средства.
Если транспортное средство A намеревалось пропустить соседнее впереди идущее ТС B на собственную полосу, но B в этом случае не выполнило смену полосы движения и A между тем уже обогнало B, то при использовании этой опции A игнорирует, что оно намеревалось пропустить B. Таким образом, A может заново пропускать на собственную полосу также и другие транспортные средства.
|
|
|
Видимость решения маршрута ТС |
ВидимРешМаршТС: |
|
|
Кооперативная смена полосы |
КоопСмПД: если транспортное средство A замечает, что впереди идущее транспортное средство B намеревается перестроиться с соседней полосы на его полосу A, то транспортное средство A попытается перестроиться на следующую полосу, чтобы облегчить транспортному средству B смену полосы движения. Например, транспортное средство A перестроилось бы с правой на левую полосу, если бы транспортное средство B намеревалось перестроиться с полосы ускорения влево на правую полосу.
Транспортное средство A при этой смене полосы движения действует таким образом, как если бы оно должно было менять полосу движения из-за соединяющего отрезка на большом расстоянии. При этом оно принимает собственное максимальное замедление и замедление позади идущего ТС C на новой полосе в соответствии с параметрами необходимой смены полосы движения. Транспортное средство A не выполняет кооперативную смену полосы движения, если выполняются следующие условия.
|
|
|
Исправление заднего ребра боковой позиции |
ИспрЗРеб: если смена полосы выполняется на меньшей скорости, чем указано в поле Максимальная скорость, задний бампер транспортного средства перемещается вбок. Коррекция заднего бампера исправляет это движение. Таким образом, в конце смены полосы движения транспортное средство стоит параллельно середине полосы движения, а не по косой к предыдущей полосе. Коррекция заднего бампера выполняется полностью, даже если транспортное средство полностью останавливается. Коррекция заднего ребра влияет на пропускную способность. Исправление заднего ребра боковой позиции учитывается только в том случае, если в параметре Боковое поведение включена опция Учесть соседние полосы движения (Редактирование параметров манеры езды Боковое поведение).
Атрибуты Активно в течение времени от и до определяют также скорость коррекции заднего ребра. |
|

 Если эта опция выбрана, то ТС могут выполнять свободную смену полосы движения выше по направлению потока в зоне малоскоростного движения
Если эта опция выбрана, то ТС могут выполнять свободную смену полосы движения выше по направлению потока в зоне малоскоростного движения  Если эта опция не выбрана, то транспортные средства никогда не начинают свободную смену полосы движения непосредственно выше по направлению движения зоны малоскоростного движения. Кроме того, они полностью игнорируют зоны малоскоростного движения на новой полосе.
Если эта опция не выбрана, то транспортные средства никогда не начинают свободную смену полосы движения непосредственно выше по направлению движения зоны малоскоростного движения. Кроме того, они полностью игнорируют зоны малоскоростного движения на новой полосе.