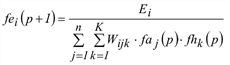
Dans les modèles gravitaires, la distribution des déplacements ou choix des destinations est calculée selon l’approche bilinéaire (par exemple Kirchhoff 1970) avec différentes fonctions d’évaluation ou d’utilité Wij.

Tij correspond au nombre de déplacements de i vers j, Wij à une fonction du coût pour le déplacement de i vers j, Ei au volume émis de la zone i et Aj au volume attiré de la zone j. Les facteurs fei, faj sont calculés de telle sorte que les volumes émis/attiré soit respectés en tant que totaux marginaux.
Le modèle EVA généralise cette approche en modèle trilinéaire pour la distribution des déplacements et le choix modal simultanés.

L’indice k désigne le mode (moyen de transport) et Wijk évalue le coût du déplacement de i vers j avec le mode k. Pour chaque couche de la demande c, il existe un système d’équations propres qui est résolu séparément. Pour des raisons de lisibilité, l’indice c a été omis pour toutes les variables dans les formulations du problème ci-dessus.
Pour la solution du système d’équation, outre le trafic émis et attiré, il faut également connaître le nombre total DTk des déplacements avec le mode k dans le cas trilinéaire. Il existe pour cela deux possibilités.
- Si vous exécutez la distribution des déplacements et le choix modal EVA pour le cas d’analyse, c.-à-d. sans calcul préalable pour le même périmètre d’étude, spécifiez les parts des modes (partage modal) en tant que données d’entrée.
- Si en revanche vous calculez un scénario de prévision, vous pouvez réutiliser les parts de modes du cas d’analyse. Vous exprimez ainsi l’hypothèse que la répartition entre les différents modes peut varier sur des relations isolées mais que le partage modal dans le modèle global (sur toutes les relations) reste inchangé.
La formulation du problème est valable pour des contraintes de totaux marginaux strictes. Dans le cas de contraintes de totaux marginaux souples, élastiques ou ouvertes, les équations sont remplacées par des inéquations pour les contraintes annexes ou la contrainte annexe est entièrement supprimée. Nous y reviendrons plus loin dans la description des procédures de résolution.
La justification probabiliste des modèles peut se faire au moyen de l’axiome de Bayes ou de la minimisation du gain d’information. Les deux moyens aboutissent au même résultat.
La minimisation du gain d’information a l’objectif suivant. Les usagers doivent subir des écarts les plus minimes possibles par rapport à leurs évaluations des relations de trafic a priori, qui entraîneraient les déplacements réellement souhaités. Des tels écarts peuvent être requis en raison des contraintes du système.
On peut admettre la matrice de la demande T comme solution du problème d’optimisation convexe
avec 
en tenant compte des contraintes de totaux marginaux. La solution qui en résulte est le système d’équations trilinéaire déjà cité.
La donnée I représente le gain d’information résultant du remplacement de la distribution wijk (déterminée uniquement par la matrice d’évaluation) par la distribution pijk également dérivée des totaux marginaux.
Probabilités d’évaluation (fonctions d’impédance)
Le coût total d’un déplacement se compose généralement de plusieurs parts (par exemple le temps de déplacement, le temps de rabattement/d’accès à destination, le coût monétaire, le nombre de ruptures de charge dans les TC etc.) que l’on appelle types de charge dans le modèle EVA. Dans le modèle EVA, les charges de chaque type sont transformées séparément à l’aide d’une fonction d’utilité puis multipliées.
Si chijk désigne la charge dans le type de charge h d’un déplacement de i vers j avec le mode k, il en résulte

avec

Mijk représente la disponibilité du mode k sur la relation (i,j) et Cijk l’utilisation de la capacité du mode k sur (i,j). h‘, h‘‘ et h‘‘‘ sont les types de charge prédéfinis Tps déplacement, Temps de marche concurrent et matrice d’évaluation externe, H correspond à l’ensemble des types de charge définis par l’utilisateur.
Mijk et Cijk sont définis de la manière suivante en fonction du type O-D de la couche de la demande considérée :
|
Type Origine-Destination |
Définition de Mijk et Cijk |
|
Type 1 |
Mijk = mk(i) pour tous les j, soit la valeur de l’attribut de zone mk configuré pour la zone d’origine i Cijk = ck(j) pour tous les i, soit la valeur de l’attribut de zone ck configuré pour la zone de destination j |
|
Type 2 |
Mijk = mk(j) pour tous les i, soit la valeur de l’attribut de zone mk configuré pour la zone de destination j Cijk = ck(i) pour tous les j, soit la valeur de l’attribut de zone ck configuré pour la zone d’origine i |
|
Type 3 |
sans tenir compte de la zone de domicile Mijk = 1 pour tous les i,j,k Cijk = ck(i) • ck(j) en tenant compte de la zone de domicile
Cijk = ck(i) • ck(j) où dn désigne le volume de domicile pour la zone n et
|
 la matrice de produit précédente, sachant que le type de charge prédéfini matrice d’évaluation externe n’entre pas dans le produit :
la matrice de produit précédente, sachant que le type de charge prédéfini matrice d’évaluation externe n’entre pas dans le produit :
Table 64 : Définition de la disponibilité du mode et de l’utilisation de la capacité en fonction du type O-D
Pour les couches de la demande du type O-D 3 calculées en tenant compte de la zone de domicile, le type de charge matrice d’évaluation externe sert donc à procéder à une pondération spécifique entre les zones et les modes. Cette pondération influe directement sur le produit total, car elle ne fait pas partie de la normalisation selon les zones de domicile, telle qu’elle est exprimée dans la formule pour Mijk. Dans tous les autres cas, ce type de charge a le même impact qu’un type de charge défini par l’utilisateur.
Vous pouvez utiliser différents types de fonctions en tant que fonctions d’évaluation fh. Vous pouvez choisir toutes les fonctions de distribution du modèle gravitaire ainsi que les fonctions EVA1, EVA2, Schiller et Box-Tukey (Calculer le modèle gravitaire).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f(x)=exp(c∙α) avec |
|
|
|
|
|
|
|
|
Aucun |
f(x) = x |
 avec
avec 




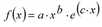

Table 65 : Types de fonction pour l’évaluation
Dans la pratique, les fonctions EVA1 et EVA2 se sont avérées particulièrement efficaces. Les fonctions EVA1 sont monotones décroissantes avec f(w) ≤ 1 pour w ≥ 0. Certaines d’entre elles sont représentées dans l’Illustration 59. Leurs paramètres peuvent être interprétés de manière géométrique.
|
a |
Paramètre marquant l’asymptote horizontale de la fonction φ(w) et influant ainsi sur l’intensité du rapprochement de la fonction f(w) de l’asymptote w |
|
b |
Paramètre influant sur l’intensité du rapprochement de l’horizontale F(w)=1 à proximité d’une charge faible |
|
c |
Paramètre influant sur la pente de la fonction f(w) |
|
b/c |
Position du point d’inflexion PI=F/G de la fonction Φ(w), pour lequel la fonction Φ(w) présente la plus forte croissance ou la plus grande « sensibilité face à l’impédance » |
Table 66 : Paramètres de la fonction d’évaluation EVA1
Les fonctions élastiques correspondantes sont données par

La fonction élastique  est définie comme seuil du quotient de la variation relative de la fonction f par la variation relative de l’impédance w.
est définie comme seuil du quotient de la variation relative de la fonction f par la variation relative de l’impédance w.
Il en ressort que les fonctions élastiques sont d’abord proches de zéro pour des valeurs d’impédance faibles, qu’elles prennent ensuite des valeurs fondamentalement différentes de zéro dans un secteur dans lequel la « sensibilité face à l’impédance » est la plus grande et qu’elles se rapprochent du seuil -E pour de fortes impédances.
Ce tracé élastique diffère donc beaucoup des fonctions élastiques constantes ou linéaires des fonctions puissances et exponentielles simples. Avec ce type de fonction, il est par conséquent possible de s’adapter à des situations d’évaluations fondamentales différentes (groupes d’usagers, motifs de déplacement, moyens de transport etc.). Dans le secteur de charge ou d’utilité faible, la probabilité d’évaluation doit être proche de un. Elle ne doit décroître plus fortement qu’une fois dans le secteur de charge ou d’utilité nettement perceptible et déterminant pour la classe de type de trafic et de motif respective avant de se rapprocher de zéro de manière asymptotique. La charge n’influe par exemple pas ou peu sur la distribution et le choix modal des usagers en zone suburbaine ou dans les petites villes (le modèle aléatoire est en grande partie appliqué avec PE = 1).
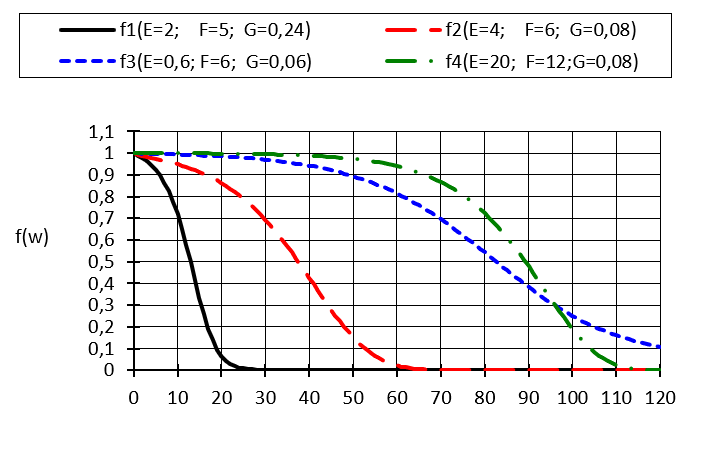

Illustration 59 : Fonction EVA1 en fonction de l’impédance w
La fonction EVA2 comporte les paramètres suivants.
|
a, b ... |
Exposants dont le produit détermine le comportement asymptotique pour des valeurs élevées de l’impédance. Pour b > 1, le tracé de la courbe ressemble à celui de la fonction EVA 1. |
|
c ... |
Facteur d’échelle pour les valeurs de l’impédance. On a |
 .
.Table 67 : Paramètres de la fonction d’évaluation EVA2
L’Illustration 60 montre l’influence de a et b sur le tracé de la courbe de fonction. Les deux autres paramètres restent constants respectivement.
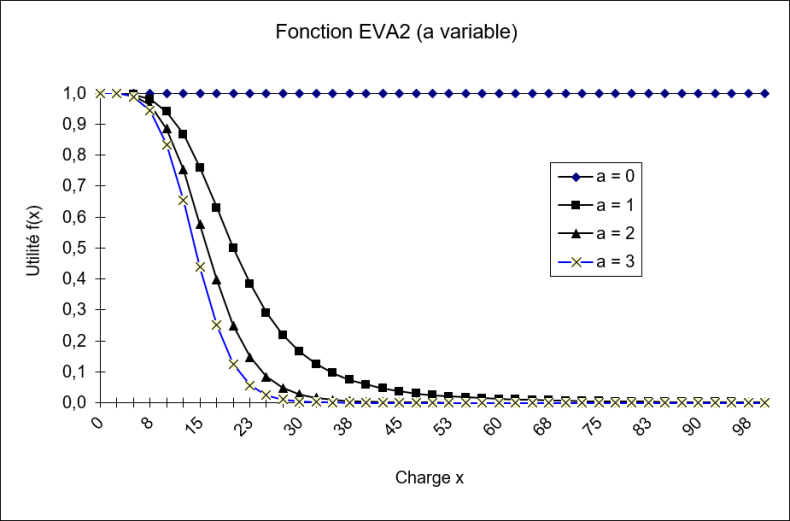
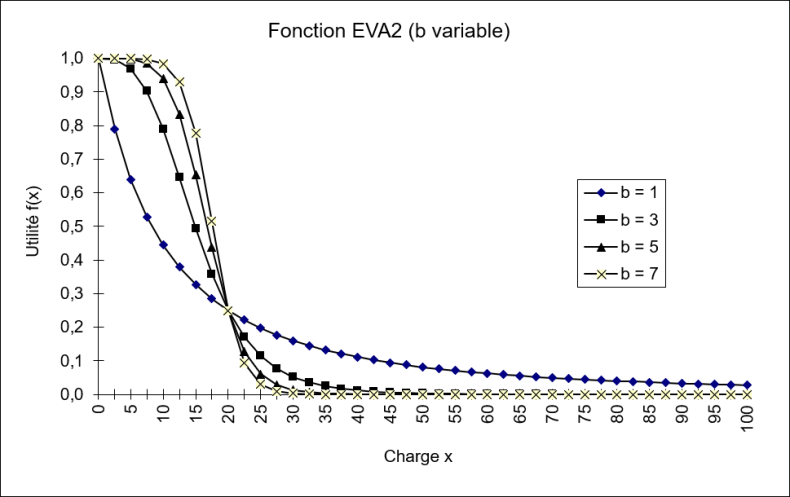
Illustration 60 : Fonction EVA2 en fonction des paramètres a et b
La fonction Schiller est un cas particulier de la fonction EVA2 mais présente un paramètre en moins. Comme l’ont montré les premières applications dans la pratique, avec celle-ci, on peut également ajuster la fonction aux données observées le plus souvent de manière suffisamment satisfaisante. L’effort de calibration est plus faible que pour la fonction EVA2 du fait du nombre moins élevé de paramètres.
Méthode de résolution 1 : la méthode trilinéaire de Furness
On a donné le nom de K. P. Furness à la méthode étudiée de la manière la plus approfondie dans les ouvrages spécialisés pour la résolution du problème bilinéaire (Furness 1962, 1965) ; en réalité Bregman l’a déjà utilisé dans les années 30 (Bregman 1967a, 1967b). On peut la généraliser et la transposer directement sur le cas trilinéaire.
Dans la méthode de Furness à trois dimensions, après avoir défini des valeurs initiales

des approximations sont calculées comme suit pour fei, faj et fhk à la p-ième étape d’itération (p=1,2,…).
 (i = 1,…,m)
(i = 1,…,m)
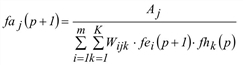 (j = 1,…,n)
(j = 1,…,n)
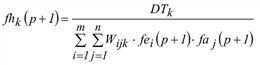 (k = 1,…,K).
(k = 1,…,K).
Pour la convergence de la méthode (vers la résolution du problème trilinéaire), la condition est nécessaire et suffisante pour la résolution sans équivoque du problème d’optimisation observé, c.-à-d. qu’il existe une matrice Tijk quelconque qui satisfait aux contraintes de totaux marginaux et pour laquelle Tijk = 0 pour strictement toutes les paires (i,j) avec Wij = 0. Cette condition est toujours satisfaite lorsque Wij > 0 pour toutes les (i,j), car on peut alors sélectionner la matrice avec les éléments  comme solution autorisée (la matrice correspondant au modèle aléatoire). A. W. Evans a spécifié une preuve de convergence pour ce cas particulier permettant également une évaluation (toutefois approximative) du taux de convergence (Evans 1970). Les expériences pratiques montrent jusqu’ici que la méthode converge rapidement dans la plupart des cas d’application.
comme solution autorisée (la matrice correspondant au modèle aléatoire). A. W. Evans a spécifié une preuve de convergence pour ce cas particulier permettant également une évaluation (toutefois approximative) du taux de convergence (Evans 1970). Les expériences pratiques montrent jusqu’ici que la méthode converge rapidement dans la plupart des cas d’application.
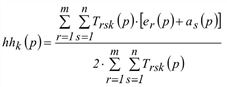
Méthode de résolution 2 : La procédure Multi trilinéaire
Une autre variante de résolution consiste à poser des équations de point fixe isolées pour les vecteurs fei, faj et fhk et de déduire à l’aide de celles-ci des règles correspondantes pour la détermination d’approximations successives pour ces vecteurs (Schnabel 1997). On peut également transposer la procédure Multi dans le cas à trois dimensions (Projeter). Il est ainsi possible de déterminer des approximations pour la résolution du problème trilinéaire conformément à la règle d’itération suivante.


(p = 1, 2,…)
avec


A vrai dire, la procédure représentée résout uniquement le problème avec des contraintes de totaux marginaux strictes. Si certaines contraintes des totaux marginaux sont souples ou élastiques, il en résulte un problème d’optimisation avec des inéquations au lieu d’équations en tant que contraintes annexes. Nous montrons grâce à l’exemple de contraintes de totaux marginaux souples comment le problème varie et comment évolue la méthode de résolution en conséquence (selon Schiller 2004). Nous admettons qu’une couche de la demande présente des contraintes de totaux marginaux souples pour la destination, ce qui signifie que le volume attiré calculé lors de la génération des déplacements représente une limite supérieure. Ceci entraîne une modification du problème trilinéaire qui devient

avec les contraintes de totaux marginaux
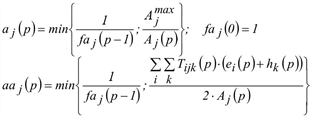
La méthode de résolution Multi est en grande partie identique à celle des contraintes annexes d’équations mais aj(p) et aaj(p) sont calculés différemment.
Si quelques unes des couches de la demande ne présentent pas des contraintes de totaux marginaux strictes, il faut non seulement ajuster la méthode de résolution mais il faut également recalculer la compensation des totaux marginaux.
|
Nota : Des différences de totaux marginaux peuvent uniquement être compensées directement après la génération des déplacements lorsque toutes les couches de la demande présentent des contraintes de totaux marginaux strictes. |
Dans ce cas, le problème trilinéaire est d’abord résolu pour toutes les couches de la demande sauf la couche « de compensation ». On obtient le volume émis et attiré total des zones pour ces couches de la demande et tous les modes. Les volumes émis et attirés de la couche de la demande de compensation sont ensuite modifiés selon les formules de calcul des volumes émis et attirés (Génération des déplacements EVA). Enfin, Visum résout la distribution des déplacements et le choix modal également pour cette dernière couche de la demande.
La procédure suppose que des différences doivent uniquement être compensées dans le cadre du volume de déplacements total. Ceci est uniquement vérifié lorsque tous les modes sont interchangeables, c.-à-d. qu’ils peuvent être utilisés à tour de rôle au cours d’une chaîne de déplacements fermée. Si au moins un mode n’est pas interchangeable, une seconde phase suit la compensation des totaux marginaux totale, calculée séparément pour chaque mode non interchangeable ainsi que simultanément pour tous les modes interchangeables. Les volumes émis et attiré des modes respectifs sont calculés pour les couches de la demande non compensatoires, leurs différences sont compensées par modification des volumes dans la couche de compensation et la distribution des déplacements et le choix modal sont calculés une dernière fois avec ces volumes modifiés. Pour les modes non interchangeables, cette dernière étape correspond à une distribution des déplacements pure et simple.
L’implémentation du modèle EVA pour la distribution des déplacements et le choix modal est répartie en deux opérations distinctes. L’opération Évaluation EVA calcule les matrices d’évaluation Wijk à partir de matrices d’indicateurs (une matrice d’évaluation par couche de la demande). Dans l’opération suivante Distribution des déplacements et choix modal EVA, les systèmes d’équations pour la détermination des matrices de la demande sont posés conformément aux contraintes de totaux marginaux et résolus à l’aide d’une des méthodes décrites précédemment. Le résultat de l’opération est une matrice de la demande par couche de la demande et par mode. On peut également afficher les facteurs de bilan pour le volume émis et le volume attiré fei et faj qui résultent de la résolution du système d’équations. Le facteur de bilan pour le choix modal fhk est affiché dans le cas d’analyse mais pas dans le scénario prévisionnel.
Il est possible de restreindre la procédure d’évaluation EVA aux relations actives ou aux relations dont les zones d’origine ou de destination sont actives. Vous pouvez ainsi exécuter l’évaluation avec différents paramètres en lisant des filtres sur différentes relations. En revanche, la possibilité n’est pas donnée pour la distribution et le choix modal combinés, car il faut tenir compte de tous les trafics du modèle en une fois pour compenser les totaux marginaux avec succès.