1. 请确保,已定义了以下路网对象:
2. 点击路网对象栏 > 冲突区域。
按标准将被动的冲突区域标记为黄色。
3. 重复以下步骤,直到显示所需交叉口控制。
4. 请使用鼠标右键点击所需的冲突区域。
5. 在快捷菜单中选择条目更改冲突区域的状态。
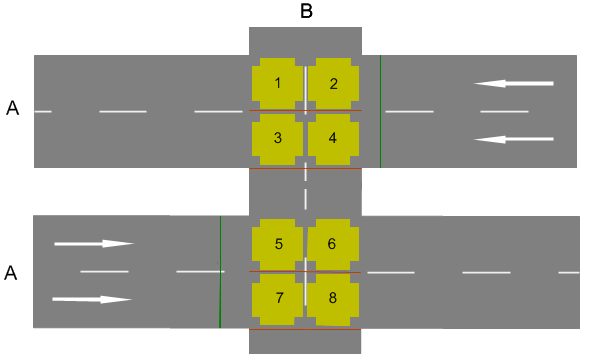
插图显示建模示例:
Vissim在行人路段的两个相反方向创建非激活的冲突面域。可修改冲突面域上的优先行驶权限 (创建冲突区域模型)。同时,冲突面域在与车辆路段相交的行人路段区域内具有相同的优先驾驶权限:行人可以优先行驶或者必须优先行驶。行人和车辆从当前优先行驶权限中基于当前速度和期望速度确定何时路过冲突面域。
冲突面域有停车线距离。停车线距离表示路段的上游位置,必须优先行驶时,行人或车辆必须在此等待。停车线使用默认值零位于与冲突面域开始位置紧邻的行驶方向。您可以通过冲突面域的可调停车线将停车线置于上游。
|
|
说明 :如果两个面域橡胶呈锐角,那么横穿道路的距离更大。因此,行人横穿路段所需的时间也增加。由于两个通过冲突面域关联的路段的相对位置没有进行几何特征分析,因此行人在达到下个车辆时无法离开站台。 |
行人想要横穿车辆路段 (A1) 并从 (A1)(上方插图)进入左侧车道的冲突面域,此时行人必须考虑停车线上的最低速度。
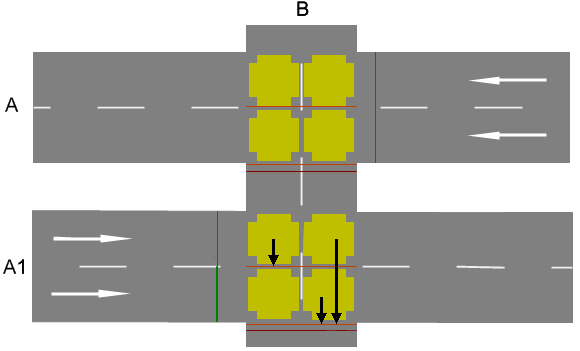
在停车线上必须动态计算最低速度:行人可以以最低速度或最高速度通过停车线,其他行人必须在停车线前等待。
行人进入带车辆路段的冲突面域的前提条件是,行人横跨整个路段(按阶)时,车道上没有人,只有一辆车通过冲突面域。此时得出行人期望速度和车辆当前速度。不考虑不在路网中的车辆。不考虑距离冲突面域路段超过 75 m 乘以车道数量的车辆。如果车辆已加速或在较近位置进入路网,那么在进入冲突面域后不再满足这些条件。此时行人在车辆路段的首个车道前等待,在车辆进入前不能完全横跨该路段。
在行人路段上,距离冲突面域上游 3 m 至冲突面域开始前之间的面域被用作冲突面域附近行人的“检测器面域”(为行人的检测器建模)。始终考虑冲突面域内的行人:
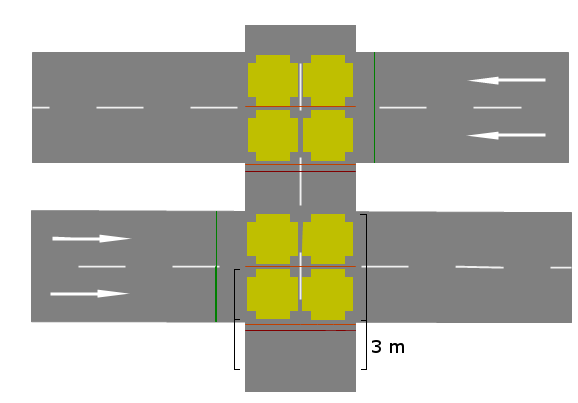
如果预计没有行人进入冲突面域,那么将行人之间或行人组之间的时间空档传递给附近车辆。借此可以相应反映。
上层主题:
