打开导航
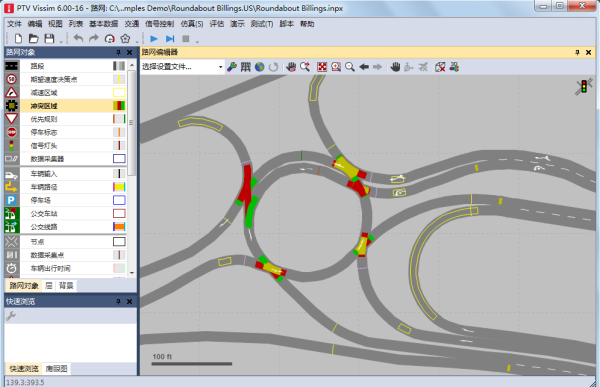
创建冲突区域模型
可以用自动覆盖在交叉控制上的冲突区域创建车辆在两个路段或连接器之间的冲突模型 (在冲突区域内定义优先权)。
如果创建十字路口优先行驶模型,则使用冲突区域代替优先规则。如果冲突区域自动显示,则能更方便地编辑并导入到仿真中成为“智能”驾驶行为。
用冲突区域创建冲突情况模型
冲突区域显示以下冲突情况:
- 十字路口:十字交叉的路段
- 汇流路口:两个连接器通向相同路段或一个连接器通向上游有其他交通的路段。如果两个连接器通向路段的前 5 m,并且在两个路段上开始,那么冲突区域在这两个路段之间的冲突也要考虑。
- 分叉路口:两个连接器从同一路段出发或一个连接器从一个本身下游超过 0.5 m 的路段出发。如果两个连接器通向两个路段的前 5 m,那么冲突区域在这两个路段之间的冲突也要考虑。
显示冲突区域
如果在路网对象栏中点击冲突区域,则自动显示路网中两个路段或连接器重叠的冲突区域。为每个冲突区域都可以选择有优先行驶的路段。冲突区域也可以保持非激活,对车辆没有影响。
在下列情况中不添加冲突区域:
- 当两路段高度(z 坐标)或与连接器的重叠区域的差别超过 1.0 m
- 当重叠少于 0.5 m
- 当其中至少有一条路段在冲突区域 开始后提前 5m 结束而且其中没有开始连接器。但是不适用于以下路段:
- 连接器
- 定义为行人面域的路段 (路段作为行人面域建模)。
- 包含车辆组成、行人 类别的车辆类型 (创建车辆组成模型)
优于优先规则的驾驶行为
冲突区域相对于优先规则更好地表现了驾驶员的驾驶行为,因为在冲突区域中驾驶员要计划如何穿过冲突区域:
必须等待的驾驶员观察主流向中的车辆并决定何时进入。同时,他计划下几秒的加速趋向。加速趋向使他能够通过冲突区域。期间,他考虑到冲突区域后的情况。当他知道他在那里因为其他车辆而必须停留或缓行时,则需要更多时间以通过冲突区域或决定再等待。
主流向中的车辆也对冲突区域做出反应:如果在十字路口的车辆无法完全通过区域,因为驾驶员错误估计情况,主流向中的车辆要刹车或停车。如果因为在下游的信号设备在冲突区域形成了堵塞,则主流向内的车辆尝试不在冲突区域内停留以免防止堵塞十字路口的交通。为了通过冲突区域,有行驶优先权的驾驶员必须执行与必须等待的驾驶员类似的决策过程。
冲突区域的状态显示在 冲突区域 列表和路网编辑器中:
- 绿色:主流向(优先行驶)
- 红色:次流向(必须等待)
- 两个红色:用于分叉路口,车辆需要互相观察。没有优先权设置,因为车辆原始顺序已改变。
- 两个黄色:非激活冲突区域,没有优先权

在路网编辑器中
显示不同状态:


车辆在冲突区域的驾驶行为
进入冲突区域的车辆的驾驶行为要产生次流向最大容量而不影响主流向。在汇流路口时,主流向内的车辆可能被阻碍,此时,车辆越多,安全距离用户定义因子越小。
- 次流向内的车辆在进入冲突区域每时间步长都要确定在达到冲突区域时是否事先在主流向中留出足够大的空位。同时要考虑安全距离。如果在主流向中留出足够大的空位,则正常继续行驶。如果不是,则表现得像必须在冲突区域前停车一样。在下个时间步长中重复该计算。从而可以停止制动过程,甚至加速,例如,以之后的间距为“目标”。
- 主流向的车辆尝试不与次流向中的车辆配合。如果确定次流向内的车辆将位于冲突区域内,当主流向内的车辆将到达那里时,它将制动直到次流向内的车辆刚好离开冲突区域时才到达。因为减速,所以延迟进入冲突区域,可以在下个时间步长中无需再次制动而正常继续行驶,这样,它就直接跟在次路段中的车辆后行驶到次路段上。
- 次流向中的车辆尝试在其下游没有足够空间方便其离开时在冲突区域前制动。这意味着要完全通过若干依次连续的冲突区域,但如果它们之间没有足够空间容纳整个车身长度则无法通过。
- 在冲突情况 十字路口 中的冲突区域内,也有主流向内的车辆尝试不进入冲突区域,如果这辆车属于 避免堵塞 属性中设置的百分比的话 (冲突区域的属性)。
- 如果次流向内的车辆感知到,主流向内的车辆到来前自己无法及时离开冲突区域的话,则它不会行驶进冲突区域上。同时还将考虑安全距离 (冲突区域的属性)。
- 已行驶在冲突区域的次流向车辆总是尝试离开冲突区域,即使这样意味着要行驶到其他冲突区域中去,即使该冲突区域不满足或不再满足 间距 条件。
- 为避免撞车,车辆可以暂时在十字路口上停在红色冲突区域。当车辆 A 发现车辆 B 即将离开冲突区域,那么车辆 A 可以在该时间点在另一个冲突区域内等待,在该区域内,车辆 A 没有优先行驶权。
