歩行者のための信号制御のモデリング
1. 次のネットワークオブジェクトが定義されていることを確認します。
- 属性 [Is pedestrian area]-[歩行者エリアとして使用] が選択されている、歩行者用のリンク (歩行者リンクの定義)。図の(B)。
- リンクの信号グループによる信号制御 (信号コントローラーエディターでの信号グループの定義)。図の(1)、(2)。
2. 歩行者リンクのある信号機の属性 [PedClasses]-[歩行者クラス] で、目的の [pedestrian classes]-[歩行者クラス] を選択します (信号機の属性)。歩行者クラスが信号機の属性で選択されている歩行者タイプに属する場合にのみ、歩行者は信号機に注意します。
図は、モデリングの例です。
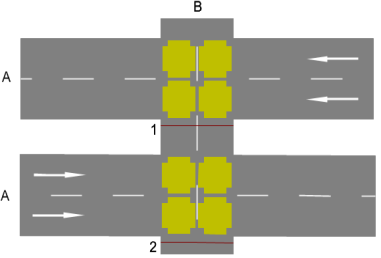
信号機が歩行者リンクに挿入された時点で、信号機は歩行者リンクの方向にのみ作動します。信号機は逆方向には機能しません。歩行者用リンクの端には、黄色い矢印で方向が示されています。この矢印は、歩行者リンクをマークしたときに表示されます。
- 信号機のヘッドが歩行者リンクの方向に挿入されると、この方向に歩く歩行者のために開閉します。これは、次の割り当てられた信号グループの動的状態に依存します:
- 赤と黄: 信号機が閉じている。歩行者は、信号機が赤または黄を示さなくなるまで、信号機で停止します。
- その他の場合: 信号機が開いており、歩行者は歩行者用リンクを歩き続けることができます。
- 歩行者は、歩行者リンクの状態に関係なく、歩行者リンクの反対方向に歩くときは常に信号機を通過することができます。これらの歩行者に信号機を介してデータを供給するには、歩行者リンクの方向を逆にし、別の信号機を挿入します。その後、元の歩行者リンクの方向に戻ることができます。つまり、歩行者用リンクには2つの信号機があり、それぞれ異なる方向に影響を及ぼします。
3. リンクの向きを逆にするには、リンクをクリックし、Tabキーを押したままにします。
信号機の動的な状態(例えば赤、青)は、信号機が所属するそれぞれの信号グループの動的な状態に連動します。
親見出し:
