運転挙動パラメータの編集 自動運転
自動運転する車両、特に車列の一部として電子的に結合された車両(小隊化)のシミュレーションでは、人間の運転挙動の属性とは異なる運転挙動の属性を定義することができます。
小隊化や小隊化車両を扱う場合、Vissimは特定の特性や挙動を考慮します (小隊化の特性と小隊化編成車両の特性)。
|
|
注意: Vissimの小隊化のシミュレーションは、小隊化がネットワークに及ぼす全体的な影響を評価するのに適しています。しかし、例えば小隊化内を走行する車両の排出量を計算するなど、小隊化内の車両に関する特定のデータを取得するのには適していません。 |
典型的な交通状況のシミュレーション例
- 車両は高速道路の決められた区間の車線で小隊化を組み、小隊化内で走行を続けます。小隊はリンクセクションの下流で解散します。
- 車両は小隊化に近づき、小隊化の一員となります。
- 小隊化の先頭車両が車両に接近すると、その車両は小隊化の一員となります。
- 車両は高速道路の出口で小隊化から離脱し、そのルートや経路をたどります。
シミュレーション結果の使用
小隊化化のシミュレーション結果を評価することで、例えば次のような疑問に答えることができます:
- 小隊化化は高速道路進入時の停止時間をどの程度変えますか?
- 小隊化内の車両数にはどのように影響しますか?
- 小隊化化はリンク区間の容量をどの程度変えますか?
|
|
ひとこと: ディレクトリ ..\Examples Training\Autonomous Vehicles (AV) で自律走行車の例を見つけることができます。 |

サンプルビデオ: シミュレーションでの小隊化化
車両は先行車両に接近し、小隊を形成します。Vissimは、[Vehicles In Network]-[ネットワークの車両]の[DrawingMode]-[描画モード] > [Use color scheme]-[色スキームを使用] > [Index in platoon]-[隊列内のインデックス] のグラフィックパラメータの助けを借りてこれを視覚化します:
運転挙動の自動運転の属性を選択します
1. [Base Data]-[ベースデータ] メニューから、[Driving Behaviors]-[運転挙動] をクリックします。
[Driving Behaviors]-[運転挙動] リストが開きます。一部の運転挙動のパラメータセットは事前に定義しておくことができます。
デフォルトでは、リストを編集できます (リストの使用)。
次の手順を使用すれば、リストやタブにある車線変更、横方向挙動、追従挙動のすべての運転挙動のパラメータを変更できます。

|
注意: リストでは、 |

2. 選択するエントリーを右クリックします。
3. ショートカットメニューで、[Edit]-[編集] をクリックします。
[Driving Behavior]-[運転挙動] ウィンドウが開きます。
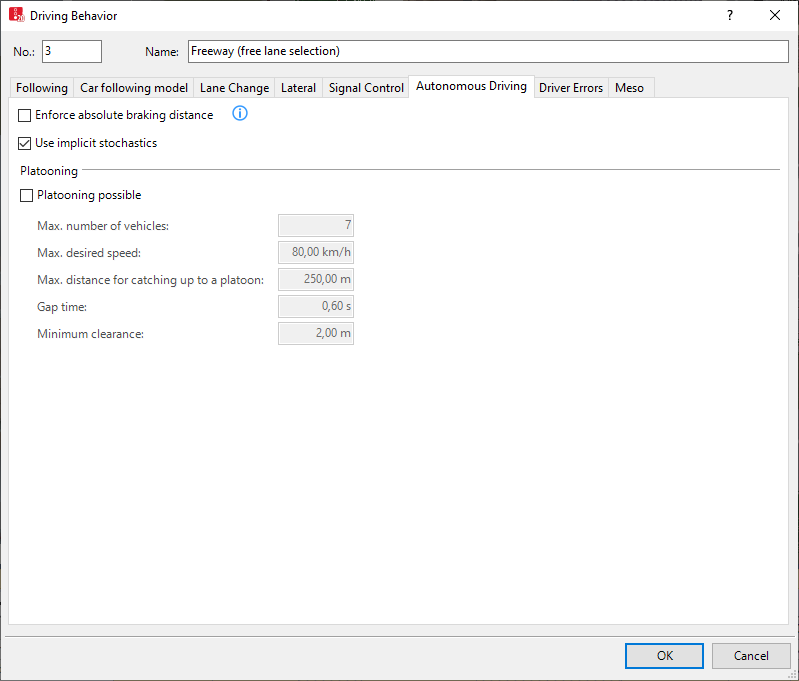
4. [Autonomous Driving]-[自動運転] タブを選択します。
5. 目的のデータを入力します。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[Maintain absolute braking distance]-[絶対的なブレーキング距離を維持] |
EnforcAbsBrakDist: ブレーキングについては、前方の車両がブレーキング距離をとらずに即座に停止した場合に、衝突を起こさずに停止するために必要な距離を考慮しています。絶対ブレーキング距離は以下の場合に適用されます:
絶対ブレーキング距離は、[priority rules]-[優先ルール]が使用されている場合には有効ではありません。 |
|
[Use implicit stochastics]-[暗黙の推計を使用] |
UseImplicStoch:
|
|
[Platooning]-[小隊化] セクション |
|
|
[Platooning possible]-[小隊化が可能] |
PlatoonPoss: 小隊化を起動し、車両は小隊化内を走行できます。 |
|
最大車両数 |
[Maximum number of platoon vehicles]-[最大隊列車両数] (MaxNumPlatoonVeh): 小隊化で運転できる車両の最大数。これには小隊化から離脱したい車両も含まれます。デフォルトは7 |
|
[Max. desired speed]-[最大希望速度] |
[Maximum platooning desired speed]-[最大隊列希望速度] (MaxPlatoonDesSpeed): 小隊化の全車両が走行可能な最高速度、デフォルト値80.00km/h。先頭車両と後続車両は、希望速度と異なっていても、小隊化の最大希望速度を使用します。希望速度は、小隊化を外れて走行する際の各車両のデフォルト速度です。 減速エリアでは、小隊化の最大希望速度は減速エリアの速度以下とされます。 |
|
[Max. distance for catching up to a platoon:]-[小隊に追いつくための最大距離:] |
[Maximum platoon approach distance]-[最大隊列アプローチ距離] (MaxPlatoonApprDist): 車両が小隊化に参加しようとする小隊化における最後尾の車両までの最大距離[m]。デフォルトは250.00 m。 |
|
[Gap time]-[ギャップ時間] |
[Platooning - follow-up gap time]-[隊列 - 追従ギャップ時間] (PlatoonFollowUpGapTm): 小隊化内の車両と先行車両間の追従ギャップ時間 ([Desired speed and safety distance within the platoon]-[小隊化内の希望スピードと安全距離])。デフォルトは0.60 s |
|
[Minimum clearance:]-[最小クリアランス:] |
[Platooning - minimum clearance]-[隊列 - 最小クリアランス] (PlatoonMinClear): 小隊化内の先行車両との最小クリアランス[m] ([Desired speed and safety distance within the platoon]-[小隊化内の希望スピードと安全距離])。デフォルトは2.00 m |
 このオプションが選択された場合、
このオプションが選択された場合、 このオプションが選択されていない場合、
このオプションが選択されていない場合、小隊化の車両については、運転状態、相互作用状態、およびシミュレーション中の小隊化内の位置(隊列内のインデックス)を[Vehicles in network]-[ネットワークの車両]リストに表示できます (リスト内のネットワークにおける車両の表示)。
