Определить стоянки для динамического распределения
Для динамического распределения можно определить различные типы стоянок (Применить типы стоянок).
Условия для размещения автостоянок и расчета путей
- Стоянки всегда должны быть размещены на ребре между двумя узлами или внутри узла.
- Стоянки, расположенные на ребре не по всей своей длине, не могут использовать это ребро в качестве стартового ребра для отъезжающих ТС или в качестве конечного ребра для прибывающих ТС.
- Ребро или поворот могут вести через отрезок, включающий расположенные рядом настоящие стоянки на нескольких полосах. В пределах одного узла могут стоянки могут располагаться на различных поворотах. С помощью этих ребер Vissim может рассчитывать пути.
- Путь не может вести через ребро с автостоянкой, мимо которой транспортные средства не могут проехать. Это встречается в следующих случаях:
- Если на ребре есть примыкание района или абстрактная автостоянка
- Если на ребре на отрезке только с одной полосой есть автостоянка с настоящими парковочными местами
Стоянка отправления и/или стоянка назначения могут находиться на таком ребре.
- Другие стоянки не могут располагаться на ребре с примыканием района или абстрактной стоянкой или стоянкой с настоящими парковочными местами на отрезке только с одной полосой движения.
- Если автостоянка располагается на отрезке, ведущем из сети, только для транспортного движения в цель, так, что из данного отрезка нельзя достичь никакой другой стоянки, то относительная нагрузка должна быть установлена для этой стоянки на 0. Такие стоянки также должны располагаться между двумя узлами.
Определение затрат на ребро
Затраты для ребра, на котором располагается стоянка, определяются как среднее значение затрат всех транспортных средств, въезжающих и выезжающих со стоянки.
Выбор парковочного места при заблокированных парковочных местах
Если при проезде решения парковочного места на всех автостоянках назначения доступны только заблокированные парковочные места, то выбирается наиболее привлекательное заблокированное парковочное место, если это парковочное место не занято.
Решение маршрута к автостоянке действует в зависимости от возвращения на маршрут ТС.
Если транспортное средство находится на маршруте, оно может выбрать парковочное место в решении маршрута к автостоянкам только в том случае, если оно может вернуться от этого места по своему дальнейшему ходу маршрута ниже по направлению движения этого решения маршрута к автостоянкам. В противном случае решение маршрутов к автостоянкам будет игнорироваться. Если транспортное средство не находится на маршруте, то оно принципиально выбирает парковочное место, если автостоянка свободна.
1. Определите нужную стоянку (Определить стоянки).
Откроется окно Стоянка.
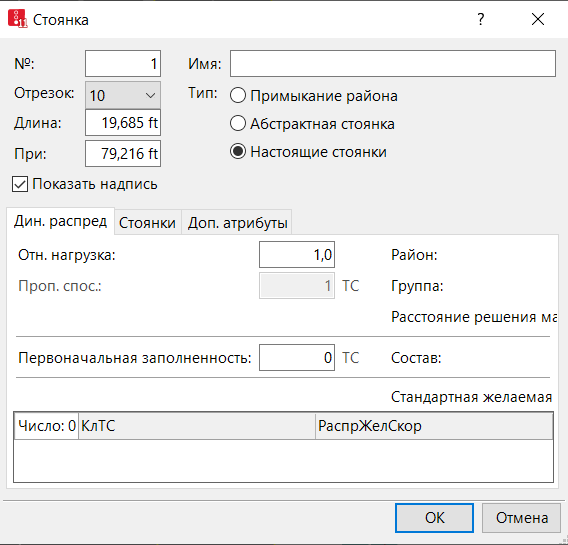
2. Выберите вкладку Дин. распред.
3. Если автостоянка должна служить стоянкой отправления или назначения с примыканием района, то выберите для параметра Тип опцию Примыкание района.
4. Выполните желаемые настройки:
| Элемент | Описание |
|---|---|
| Отн. нагрузка |
ОтнНагр: действует только в следующих случаях.
Например, значение 0 = нет движения из источника для стоянки на отрезке, ведущем из сети. При нескольких автостоянках сумма значений района = 100 %. Отсюда рассчитывается процентная доля для каждого района. Можно установить относительные нагрузки всех автостоянок на суммы нагрузок (Установить относительные нагрузки всех автостоянок на суммы нагрузок). |
| Вместимость |
Только для стоянок с атрибутом Абстрактная стоянка: максимальное количество ТС. Для параметра Настоящие стоянки значение выводится из длины автостоянки и парковочного места. Вместимость не может быть изменена. |
| Район |
Номер района из матрицы корреспонденций для стоянки. К одному району могут относиться несколько стоянок. Количество районов определяет размеры матрицы корреспонденций (Редактирование матрицы источника-цели для движения транспорта в редакторе матриц).
|
| Целевая группа |
Относится только к стоянкам с атрибутом Настоящие стоянки: номер целевой группы стоянки, за которой закреплена данная стоянка. Транспортное средство может выбрать любую стоянку в данной целевой группе, если в качестве цели указана одна из стоянок в данной целевой группе. Стоянка без присвоенного номера целевой группы не относится ни к какой целевой группе. Присвоенная стоянка назначается всем решениям парковочного места своей целевой группы, которые находятся не дальше, чем сумма расстояния до решения парковочного места и максимального расстояния до объединения решений парковочных мест, по умолчанию 50 м + 50 м. Для автостоянок, относящихся к одной целевой группе, комбинируются созданные автоматически решения парковочного места, если они расположены менее чем в 50 м друг от друга. Если транспортное средство имеет в качестве места назначения одну из стоянок целевой группы и, следовательно, может выбрать стоянку целевой группы, то критерий, выбранный для решения маршрута типа Динамический, применяется также ко всем стоянкам целевой группы, к которым относится стоянка. Например, Стоянка заполнена = все стоянки группы заняты. Решения парковочного места создаются автоматически при запуске имитации (Применить типы стоянок). Решения парковочного места не могут показываться или редактироваться в списках. |
| Расстояние решения маршрута | РасстРешМарш: расстояние решения парковочного места к автостоянке. |
| Первоначальная заполненность |
НачЗаполн: относится только к параметрам Абстрактная стоянка и Настоящие стоянки. Первоначальная заполненность в транспортных средствах указывает, на какую заполненность стоянки к началу имитации следует рассчитывать при выборе стоянки цели. Это действует также для динамических решений маршрутов. Кроме того, первоначальная заполненность служит для определения момента времени, когда вместимость стоянки будет загружена. Не указывайте количество транспортных средств, которые прибудут на стоянку только в ходе имитации и позже выедут оттуда. Они могут содержаться в матрицах Источник-Цель. Для параметра Настоящие стоянки введите состав начального заполнения. |
| Состав |
СостПервЗаполн, относится только к категории Настоящие стоянки: выберите подходящий состав потоков ТС для параметра Начальное заполнение (Моделировать состав транспортного потока). |
| Стандартная нужная скорость | Распр.жел.скор. Стандарт (РаспрЖелСкорСтанд): присвоенное распределение нужной скорости по классам ТС и их нужной скорости. Стандартное распределение нужной скорости и нужной скорости используется для всех тех ТС, тип ТС которых не относится ни к одному из показанных в списке классов ТС. |
 : открытие окна
: открытие окна 5. Подтвердите с помощью OK.
Атрибуты сохраняются в списке Стоянки(Атрибуты автостоянок).
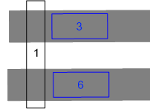
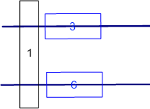
Пример моделирования примыкания района по краям сети
Рисунок показывает примыкание района из файла примеров ..\Dynamic Assignment\Drop-off Zone.Trip Chains\Drop-off Zone inpx.
| Отображение в каркасной модели выкл | Отображение в каркасной модели вкл |
|---|---|
|
|
|
|
Установить относительные нагрузки всех автостоянок на суммы нагрузок
Если экспортирована сеть из Visum и применяется другой сценарий нагрузок с новым файлом матрицы и новым файлом путей, то в таком случае больше подходят относительные нагрузки исходных стоянок.
- Нажмите сочетание клавиш Ctrl + Shift +C.
Относительные нагрузки всех автостоянок будут установлены на суммы нагрузок их путей в текущем файле путей *.weg.
Избегать ошибок при моделировании автостоянок
Такое сообщение об ошибке, как Автостоянка 1 располагается как место для поиска пути на нескольких ребрах, может означать, что отсутствует или некорректно размещен по меньшей мере один узел. В результате этого между обоими узлами обнаруживаются несколько путей, между которыми расположена автостоянка. Для каждого из этих путей отдельно рассчитываются затраты. Это может привести к разным затратам на отрезке для одной последовательности отрезков (дорога в реальности) и тем самым способствовать ошибочному распределению ТС.
Чтобы предупредить возникновение этой проблемы, при размещении стоянки в сети Vissim убедитесь в следующем.
- По направлению движения начальная точка пути перед стоянкой должна быть частью узла.
- По направлению движения конечная точка пути позади стоянки должна быть частью узла.
- Оба узла, между которыми находится автостоянка, должны быть корректно смоделированы и содержать начальную точку и конечную точку пути между двумя узлами.
Вышестоящая тема:
Дополнительные темы: