Modeling parking and stopping on the roadside
For parking or stopping on the roadside define:
- a parking lot of the type Real parking spaces. Depending on the attributes Length and Length of each space: the parking lot may have several parking spaces. The parking spaces are aligned one after the other towards the lane.
- a vehicle routing decision of the type Parking lot, with one or several vehicle routes. Each vehicle route leads from the vehicle routing decision to a parking lot (Defining parking routes).
Vehicle routing decisions of the type Parking Lot work similarly to vehicle partial routes (Modeling vehicle routes, partial vehicle routes, and routing decisions). However, instead of routes, the desired number of parking lots is assigned. In the attributes of the vehicle routing decision type Parking lot you can specify the following attributes (Attributes of parking lots):
- Parking duration: The desired time distribution from which the period for how long the vehicle should park is determined.
- Parking rate: The percentage of vehicles you want to assign a parking space of the parking lots assigned per time interval.
Positioning a parking lot and vehicle routing decision of the type Parking lot
In the network editor, you have the following options for adding a parking space and the routing decision:
- Create a car park together with the necessary network objects:
Add a car park if you want to define a perpendicular or diagonal parking lot with several parallel parking spaces (Creating a car park), (Creating a car park in the network editor and defining attributes). Vissim creates all necessary network objects and protections against conflicts and places a new routing decision of type Parking Lot for each direction of the drive aisle. You must move it to the desired upstream position (Positioning parking routing decisions of car parks).
- Add network objects individually:
Add the parking space and the routing decision individually if you want to define longitudinal parking spaces, individual perpendicular or individual diagonal parking spaces. A parking lot is created in the Network editor on a lane (Defining parking lots). If the lane does not continue downstream of the parking lot, the emergency stop position of the first downstream connector must not be tangent to the parking lot (Attributes of connectors).
The beginning of a parking lot must be positioned in movement direction and at a sufficient distance further downstream of the corresponding vehicle routing decision of the type Parking lot. This allows vehicles enough time to slow down and safely reach the first parking space. Otherwise, it might not be possible to allocate a vehicle to the first parking space(s), or the vehicle might miss its assigned parking space and block the traffic flow.
If the parking lot is located on a single-lane link, vehicles parked there might hinder free traffic flow on this link. With each time step, vehicles heading for a parking space in this parking lot check whether there is another parking space available. The vehicle thus drives far downstream in order to move up, if possible, and if the value of the Attraction attribute has been set to such a high level that the parking space located downstream is more attractive than the parking spaces located upstream.
Requirements for a vehicle to take the routing decision into account
If the vehicle passes the routing decision of the type Parking lot, Vissim checks the following criteria so that a parking route can be allocated to the vehicle. If a criterion is not met, the vehicle continues to follow its route or path.
- The vehicle has not yet been allocated a destination parking lot.
- A routing decision has been defined for this parking route.
- The time interval for the parking route is long enough.
- Values for the time interval are specified in the routing decision attributes Parking duration and Parking rate.
- The vehicle type is part of a vehicle class selected for the routing decision.
If these criteria are met, Vissim determines whether a parking route can be allocated to the vehicle on the basis of the distribution of the Parking rate attribute. In doing so, the vehicle classes selected are taken into account. Vissim then checks whether the parking duration from the distribution equals 0 seconds.
If the criteria are met, the vehicle is looking for a parking space and Vissim checks whether a parking space and parking route can be allocated to the vehicle.
Requirements for the vehicle to be allocated a parking space
- A parking route can be allocated to the vehicle.
- For the parking routing decision, the entry Waitis selected in the Full occupancy behavior attribute, not all parking spaces in the parking lot are already occupied and a vehicle is not already waiting in front of each parking space.
- Free parking spaces are long enough.
- The car park can be accessed during its normal opening hours.
- If the Detect blockage attribute is selected: at least one parking space is accessible.
- Free parking spaces are located downstream of emergency stops.
- The time distribution period selected in the Parking duration attribute of the vehicle routing decision type Parking lot is shorter than the time period specified in the Maximum parking duration attribute of the parking lot.
- There is enough parking capacity. The parking capacity of parking spaces is based on the length of the parking lot and the length of each parking space. To change the parking capacity, in the Network editor, change the length of the parking lot.
Vehicle routing decision assigns vehicle parking space
Vissim selects the parking space depending on the following attributes (Attributes of parking lots):
- Available parking spaces for the respective vehicle length, depending on the Length per parking space attribute
- Attraction: The best suitable parking space is determined based on the attribute Attraction. If multiple parking spaces have the same attraction, Vissim choses one of them based on uniform distribution.
If no suitable parking space is found, the parking request will be rejected and no parking route will be allocated. The vehicle continues on its route or follows its path. This is also the case if a parking space cannot be assigned to a vehicle when crossing a parking routing decision because there is no way back to the current route of the vehicle from any of the available parking spaces.
Vissim finds suitable parking space
If a parking lot only consists of a single parking space, a vehicle may park there if it is maximally as long as the parking space. The vehicle needs at least 2 cm more space for parking than the length of the parking space.
If the vehicle is longer than a parking space, Vissim checks whether two or more adjacent spaces are available to accommodate the vehicle. If a vehicle takes up all the parking spaces of a parking lot, the vehicle may park there if it is maximally as long as the total length of the parking spaces. If a vehicle does not take up all the parking spaces of a parking lot, the vehicle may park there if the total length of the parking spaces is at least 0.5 m longer than the vehicle. This ensures that there is sufficient space for parking and leaving the parking space on the parking space and the other adjacent parking spaces.
Parking spaces that are only partly used by a vehicle will not be assigned to another vehicle and are considered occupied. A vehicle always come to a standstill at the beginning of a parking space. If there are not enough adjacent parking spaces available for the long vehicle, it does not park, but continues on its route.
Vehicle routes to parking space
Vissim automatically generates vehicle routes that lead from the vehicle routing decision of the type Parking lot to each parking space of the corresponding parking lots. You cannot change these internal vehicle routes.
Displaying parking vehicles, vehicles leaving a parking lot and parked vehicles
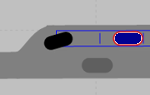
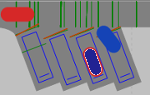
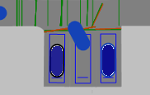
During the simulation, vehicle movements are displayed realistically for vehicles pulling forward or backing into a parallel, diagonal or perpendicular parking lot or pulling forward or backing out of it. Once the vehicle has reached its final parking position in the parking space, in 2D mode, the vehicle inside is highlighted in blue (by default). This corresponds to the color of the parking state Parked. Examples:
| Parallel parking lot | Diagonal parking lot | Perpendicular parking lot |
|---|---|---|
|
|
|
Dwell time distribution defines parking duration
For the Parking duration attribute of the parking routing decision, you can select the desired time distribution. The parking duration begins when the vehicle is parked in the parking space in the direction of travel and the traffic on the adjacent lane, previously blocked, can flow again.
Assigning the vehicle a free parking space
If a parking space has not been assigned to a vehicle and no vehicle is parked in it, it is considered free. Vissim can then assign this space to a vehicle. This is also the case, if the parking space can currently not be reached, as it is blocked by a vehicle, e.g. because of a traffic jam.
Occupying and blocking parking spaces
A parking space is considered occupied and is not assigned to another vehicle, if:
- It has already been assigned to a vehicle. The vehicle follows its route until it comes to a stop in the parking space. From this point on, the parked vehicle blocks the parking space.
- If because of its length, a vehicle is assigned several adjacent spaces, these are considered occupied. The vehicle follows its route until it comes to a stop in the parking spaces. From this point on, the parked vehicle blocks the parking spaces.
- The parking space is considered occupied and remains assigned to a vehicle, even if the vehicle has not yet reached it or access to it is blocked by another vehicle due to the following:
- The vehicle is parked in a traffic jam.
- The vehicle is stuck in a traffic jam on a lane next to the parking space.
- The vehicle is stuck in a traffic jam on the connector leading to the parking lot link where the parking space is located.
- as soon as a parking space is reserved for a waiting vehicle, as all parking spaces that can be assigned according to routing decision type Parking lot are still occupied.
Parking when parking lot is blocked
If a vehicle is unable to park because another vehicle is blocking access to the parking lot, after 60 seconds its driving status changes to Ignores parking blockage and the vehicle still parks.
Leaving the parking space
After the dwell time, the vehicle leaves the parking space via an automatically generated route that guides it back to its original route. To do this, Vissim performs a shortest path search from the end of the parking lot to the middle of the connectors that are included in the vehicle's original route and that are downstream of the parking routing decision. From the results, Vissim selects the shortest route. As soon as the vehicle leaving the parking lot reaches the half of the connector of the original route selected this way, its return route is completed and it follows its original route.
|
|
Note: Vissim determines the path with the shortest distance to a position downstream of the parking routing decision. For generation of the route that takes the vehicle from the parking lot back to the route network, Vissim accounts for the entire route as well as for the current position of the vehicle on the parking lot it wants to leave. Thus, a vehicle might travel part of its original route twice or skip part of it. |

Parking directions when parking and leaving a parking lot
The Parking direction attribute of the parking lot defines whether the vehicle is allowed to pull forward into or out of the parking lot and to back into or out of the parking lot (Attributes of parking lots).
- Forward > forward: Use the park direction Pull forward into and out of parking lot to model, for example, a longitudinal parking lot with several parking spaces parallel to the link or a diagonal parking lot between two parallel links that the vehicle can leave downstream.
The following parking directions allow parking in a diagonal parking lot or perpendicular parking lot with one or more parallel parking spaces. The vehicle will leave the parking lot again in the direction upstream of the parking lot link into which it parked:
- Forward > reverse: Pull forward into and back out of parking lot
-
Reverse > forward: Back into and pull forward out of parking lot
-
The parking direction Any > opposite allows both options: Vehicles can pull forward into and back out ot the parking lot or back into and pull forward out of the parking lot. This parking direction does not allow pulling forward into and out of the parking lot or backing into and out of the parking lot.
To model diagonal or perpendicular parking lots, use the Create car park function (Creating a car park in the network editor and defining attributes). This allows you to insert complex car parks in just a few steps. In this case, you define the number of parking spaces in the network editor and automatically open the Create car park window. Here you define relevant attribute values. Then Vissim creates all the necessary network objects. If you specify attribute values for parking rates (forward) and for parking rates (reverse) in the Create car park window, Vissim will also create all the necessary network objects for all directions to allow vehicles to pull forward and back into a parking lot, and to pull forward and back out of a parking lot. This means that at a later point in time, you can simply change the Parking direction attribute of the parking lot to specify in which direction a vehicle can park and leave the parking lot without having to create network objects afterwards.
Requirements for the modeling of parking spaces
Consider the following prerequisites if you define parking lots manually and do not use the Create car park function that ensures these prerequisites:
- The parking lot link ends downstream of the parking lot.
- At least one connector must lead from the main link to the parking lot link.
- A parking route must lead from the parking routing decision to the parking lot via this connector.
If the vehicle is to back into the parking lot, the following modeling requirements must also be met.
- The connector to the parking lot link must start downstream of the perpendicular parking lot, since the vehicle on the main link must first pass the parking space before it can back into it.
- For this connector, the Reverse parking attribute must be selected (Attributes of connectors).
- At the parking lot, the selected value of the Parking direction attribute must allow reverse parking.
Restrictions for reverse parking
The following functions and methods do not support reverse parking:
- Dynamic assignment
- Mesoscopic simulation
- Define major flow
- ANM routes
- Flow bundles
-
External driver model and driving simulator interface
Limitations for reverse parking:
- PT vehicles do not back into a parking lot.
- The connector with the Reverse parking attribute can have only one lane.
- Conflicts between vehicle and pedestrian are not taken into account.
- Relevant result attributes and restrictions in evaluations are described with the respective evaluation (Overview of evaluations).
- Overlapping and jumps can occur when displaying the parking maneuver of very long vehicles.
- Traffic signals on the main link cannot be aligned in the direction of connectors where a vehicle is backing into a parking lot.
If the vehicle backs out of the parking lot, the following applies:
- The car following model may be Wiedemann 74 or Wiedemann 99.
- Visibility is based on the driving behavior parameters for forward driving. This allows Vissim to determine the distance and number of perceived vehicles. The distance is calculated starting from the rear edge of the vehicle. The vehicle backing out of the parking space perceives other vehicles on its route. If there is an oncoming vehicle, both vehicles can brake.
- The DesSpeed of the vehicle is based on the DesSpeed specified in the Speed (reversing) attribute of the parking lot.
- The vehicle does not accelerate beyond its desired acceleration.
- At the end of the parking duration, the vehicle leaving the parking lot reverses onto the first connector it reaches and whose desired direction is All, back onto its starting link. When backing out of the parking space, the vehicle may only use connectors whose desired direction is All, Right or Left and ignores connectors with the direction None. The connector used by the vehicle when backing out of a parking lot is a different connector than the one used by the vehicle for parking and may lead to a different link or lane. The vehicle reverses until it has reached the link on which its route lies and on which it can continue driving forward. As soon as the vehicle has completely reached the link while reversing, it comes to a standstill at the turning point. The vehicle continues driving forward on its route once the waiting time defined in the parking lot attribute Direction change duration distribution has passed (Attributes of parking lots). When driving forward, the vehicle drives at the DesSpeed valid before parking.
- Vissim Internally calculates the position of the turning point at which the vehicle comes to a standstill, so that the vehicle can continue driving forward on its route from the next time step.
- The attribute Direction of travel of the vehicle has the value Reverse. You may display it for example in the Vehicles In Network list.
- The attribute Driving condition of the vehicle has the value Reversing. You may display it for example in the Vehicles In Network list.
- The vehicle follows its vehicle route. The route uses the front edge of the vehicle as a reference point.
- Vehicles backing out of a parking space must be protected against any vehicles approaching: Vehicles leaving a parking space wait for a gap in the major flow, vehicles parking wait to let a vehicle leave a parking space. Conflict areas on the connectors used by the vehicle for leaving a parking space are sufficient for protection. These conflict areas must be assigned the status passive (Using conflict areas). Further network objects for the protection of vehicles backing out of a parking space are not required, for example priority rules or stop signs. In order for Vissim to secure the vehicle backing out of the parking space, the vehicle must have at least 3 cm more space to back out of the parking space than the length of the parking space. The protection of the vehicle also takes into account vehicles on drive aisles with oncoming traffic on the opposite lane.
- A vehicle can pull forward into the parking space of a perpendicular parking lot located very close to the end of a dead end. When leaving the parking lot, however, there may not be enough room for the vehicle to back out into the nearby lane of the link on which it intends to continue its route. In this case, Vissim inserts a link and connector through which the vehicle will leave the parking lot and reach the nearby lane. This also applies to reverse parking at the end of dead ends.
|
|
Note: When using Vissim version 2020 or later to open a Vissim network created in a previous version, make sure the conflict areas have been assigned the status passive on the connectors that the vehicle uses for backing out of a parking space. This will eliminate the need for other network objects defined for securing vehicles backing out of a parking space, such as priority rules or stop signs. Also check the protection in the simulation and delete any unnecessary network objects. |
Parking behavior on links with several lanes and parking lots
A vehicle only selects a parking space that is not occupied or blocked by another parking vehicle.
In the following cases, an available parking space is blocked by another vehicle that is either parked in the space or on a lane next to an available space:
- To the left and/or right of the parking space, there is a lane without a parking lot, on which a vehicle is parked next to the available parking space.
- To the left and/or right of the parking space, there is a lane with parking lots and another lane without parking lots. A vehicle is parked in the parking space between the available parking space and the lane without a parking lot.
- To the left and/or right of the parking space, there is a lane with parking lots and another lane without parking lots. There are two available parking spaces next to each other, but a vehicle is parked on the lane next to the two spaces.
As soon as a vehicle traverses the section of a vehicle routing decision of the type Parking lot, Vissim checks its vehicle routes and the corresponding parking lots. Vissim then finds and occupies a parking space for the vehicle. With every time step, Vissim checks for all vehicles that do not have the status Waiting, whether the occupied parking space is still accessible. If the parking space is still accessible and lies on a link with a single lane, or if the parking space is no longer accessible, Vissim will look for an accessible parking space that is available. This parking space must be located on a parking lot downstream of the current parking route of the vehicle.
If the parking space chosen for a vehicle is still available when the vehicle traverses the decision point, but is occupied right before it arrives there, the vehicle will choose another parking space. Precondition: There is still a parking space available further downstream, on the route of the parking routing decision.
If an attractive parking space becomes available after the vehicle has traversed the decision section, the vehicle drives towards the originally selected parking space as long as it is still accessible.
If the vehicle cannot park on any of the parking spaces because there are not enough spaces available and accessible, the vehicle routing decision of the type Parking lot is ignored. The vehicle continues driving on its original route.
When the vehicle leaves a diagonal parking space onto a link with multiple lanes, it chooses the closer lane.
Parking behavior with one lane and at least one occupied parking space
If on a lane with multiple parking spaces in a row, one or several of the spaces are occupied or reserved, the driver of a vehicle will choose a parking space further upstream that is located before the other available parking spaces. This is also true if the Attraction attribute suggests a parking space further downstream. With each time step, the driver of the vehicle checks whether in the meantime a more attractive parking space has become available and changes its destination accordingly.
Vehicle reserves parking space and waits until parking space is free
If a vehicle passes a vehicle routing decision of the type Parking lot and there is no free parking space, you can set the attribute Full occupancy behavior to specify what you want the vehicle to do in this case (Attributes of parking routing decisions):
- continue driving
- drive to the next parking space that can be reserved, wait there until the parking space frees up and then park there
Requirements for a parking space to be reserved:
- The parking space is occupied, a vehicle is parked in it.
- The parking space has not been reserved.
- The length of the parking space is large enough to fit the length of the vehicle. If the vehicle is longer than the parking space and multiple adjacent spaces cannot be reserved, the vehicle continues driving.
On its way to a reserved parking space, the vehicle does not look for another free parking space.
The vehicle continues driving in the following cases:
- There is no free parking space available.
- No parking space can be reserved.
- All parking spaces are reserved.
- For the parking routing decision, in the attribute Full occupancy behavior, Drive On is selected.
- There is no parking space that is long enough for the vehicle.
- Vissim Is unable to calculate the parking duration, as all parking spaces are occupied, but no vehicles are parked there yet, e.g. because they have not yet reached their assigned parking space or cannot reach it because another vehicle, stuck in a traffic jam, is blocking it.
Use parking lot groups
You can allocate parking lot groups to parking lots that you would like to include in the Parking lot groups evaluation (Defining parking lot groups), (Displaying parking lot group results in lists).
Evaluate parking lots
You can use evaluations to enter result attributes for the following object types and display them in lists:
- Parking spaces (Displaying parking space results in lists)
- Parking lots (Displaying parking lot results in lists)
- Parking lot groups (Displaying parking lot group results in lists)
- Parking routing decisions (Displaying parking routing decisions in lists)
The evaluations take into account the effects of routing decisions that are traversed within the same time step.
For the Vehicle record evaluation you can also select result attributes that contain parking space data (Saving vehicle record to a file or database).
If a vehicle is removed from the Vissim network via COM and it is included in an evaluation that evaluates parking maneuvers, the Number of parked vehicles is reduced by 1. However, this is not considered as leaving a parking space.
If a vehicle of the dynamic assignment is added to the Vissim network via COM, the Number of parked vehicles is increased by 1. However, this is not considered as parking. If a path is allocated to this vehicle, it will leave the parking space and follow its path.
Evaluations take occupied parking spaces into consideration.
If the vehicle occupies several parking spaces in a parking lot due to its length, Vissim includes this result as a single parking operation in the evaluation.
If the distance between the front edge of the parked vehicle and the next downstream parking space of a longitudinal parking space is less than the minimum distance of 0.5 meters, this parking space is also considered occupied by the vehicle, as no other vehicle can use this parking space. This also applies to the minimum distance between the rear edge of the vehicle and the adjacent parking space located upstream of the vehicle’s parking space.
