可为动态分配定义不同的停车场类型(使用停车场类型)。
1. 定义所需的停车场 (定义停车场).
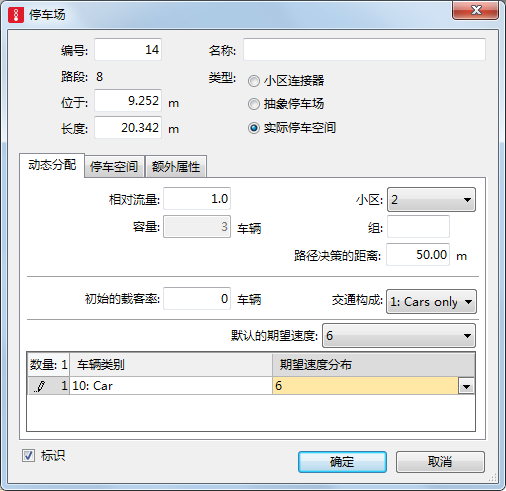
窗口停车场打开。
2. 选择动态分配选项卡。
3. 进行相应设置:
| 元素 | 说明 |
|---|---|
| 相对流量 |
相对车流:仅在一个小区有多个停车场时有意义:小区的到达比例。 例如:值为 0 = 路网中通向外路段上的停车场没有源交通。有多个停车场时,小区该值的总和 = 100%。从中可算出每个小区所占的百分比。可将所有停车场的相对流量设置为流量总和(将所有停车场的相对流量设置为流量总和) |
| 小区 | 将 OD 矩阵中的小区编号分配给停车场。一个小区下属可有多个停车场。 |
| 通行能力 |
仅与带属性抽象停车场的停车场相关:车辆最大数量。 对于实际停车空间,由停车场长度和停车位长度得出数值。通行能力不能修改。 |
| 组 |
仅与具备实际车位属性的停车场有关:应分配给停车场的停车场组编号。没有编号时,停车场不属于任何组。为已分配的停车场分配其停车场组的所有空间决策点,距离不会过远,作为空间决策点距离和合并空间决策点的最大距离之总和,默认为 50 m + 50 m。 对于组的停车场,自动生成的空间决策点在彼此之间距离小于 50 m 时自动组合。当一辆车将组中的一个停车场作为目的地时,可选择组中的每个停车场。标准相应地有效,标准是为类型动态的创建路径决策以及停车场所属组的所有停车场而选择,例如:停车场满 = 组中所有停车场已占用。 仿真开始时自动生成空间决策点(使用停车场类型)。无法在列表中显示或编辑空间决策点。 |
| 初始载客率 |
初始载客率:仅与抽象停车场和实际停车空间有关。 车辆的初始载客率是指,应以何种停车场的占用率在目的地停车场选择仿真开始时计算。这也适用于动态路径决策。此外,初始载客率还用于测定停车场通行能力达到满负荷的时间。不要输入仿真运行时先到达停车站而后又再次开走的车辆数。该数值可包含在矩阵中。请为实际停车空间指定初始载客率的交通构成。 |
| 交通构成 |
初始载客率构成:仅与实际停车空间有关:请为初始载客率选择合适的车辆组成(创建车辆组成模型)。 |
| 路径决策点-距离 | 路径决策点-距离:空间决策点到停车场的距离 |
| 默认期望的速度 | 默认期望速度 (vWuVertStd):每个车辆类别分配的期望速度分布。默认期望车速分布用于车辆类型不属于所显示车辆类别的所有车辆。 |
| 标签 |
 如果未选中该选项,则即使选中所有停车场标签也不显示停车场标签。可为停车场标签选择: 如果未选中该选项,则即使选中所有停车场标签也不显示停车场标签。可为停车场标签选择:
|
4. 点击 OK 确认。
这些属性将保存到列表停车场中(停车场的属性)。
|
|
说明:
|
如果已从 Visum 中导出一个路网并且使用含新矩阵文件和新路径文件的另一流量场景,将会改善出口停车场的相对流量。
将所有停车场的相对流量在最新的路径文件 *.weg 中设置为其路径的流量总和。
一条错误信息如停车场 1 作为多条通路上搜寻路径的地点可能表示至少有一个节点错误或未正确定位。这样在两个节点之间就找到多条路径,停车场位于其中。针对每条这种路径测得单独的路段费用。这可导致对于一条路段序列(现实中的街道)产生不同的路段费用,因此造成车辆分布错误。
为了防止这类问题发生,在 Vissim 路网内定位停车场时请确保:
