
说明 : 您可以在列表中通过选择属性图标 显示和隐藏带有属性值的列 (选择列表的属性和子属性)。
显示和隐藏带有属性值的列 (选择列表的属性和子属性)。
当您添加此路网对象并已经选择在创建对象后自动打开编辑对话框,则窗口连接器自动打开 (创建对象后,定义右键点击的操作)。
在此窗口内请您输入此路网对象的属性值。已经定义的路网对象您可以通过下列功能调用此窗口:
路网对象可以提供其他属性。路网对象的所有属性和属性值,您都可以在路网对象类型的路网对象列表中显示。可以通过以下功能打开列表:
路网对象的属性和属性值,您都可以在路网对象类型的路网对象列表进行编辑 (选择列表中的单元)
这种对象类型的对象可能与其他对象有关联。 因此,该属性列表可作为两个关联列表的左列表显示。您可以通过右侧选择列表 关联显示含期望关系属性的关联列表(使用关联列表)。
|
|
说明 : 您可以在列表中通过选择属性图标 |
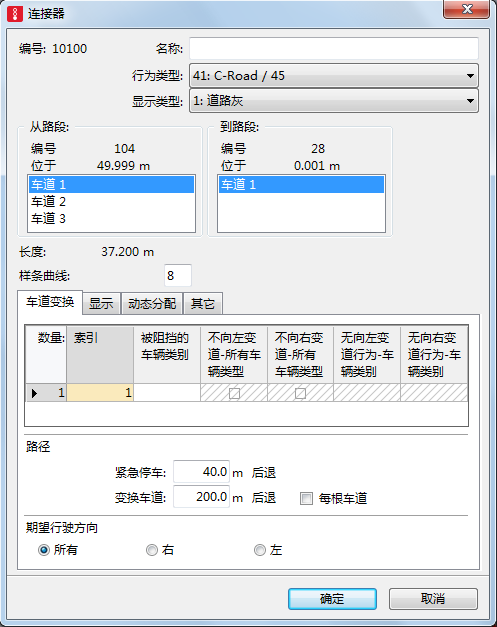
窗口上部区域和路网对象类型的路网对象列表内显示路网元素的基本属性。
| 元素 | 说明 |
|---|---|
| 编号 |
连接器的唯一编号 |
| 名称 | 连接器名称 |
| 行为类型 |
路段行为类别 (路段行为类型):连接器的驾驶行为 (定义路段和路段连接器的路段行为类型) 和 (定义驾驶行为参数集)。 |
| 显示类型 |
连接器彩色显示 (定义路段和构造元素的显示类型) |
|
从路段 至路段 |
在开始路段 (从路段) 的车道至后续路段 (到路段) 的车道之间添加连接器。在两列表中总是选择相同的车道数。配对也可以在之后编辑。 |
| 长度 |
|
| 样条曲线点 | 样条曲线点为了图形显示。样条曲线点 与行驶车辆的驾驶行为无关。如果输入多个样条曲线点,则可以准确的模拟连接器。 直线连接器使用 2 个样条曲线点就足够了。较长的连接器可能需要多达 15 个点,例如:弯道。 如果连接器的起始点或终止点在其它路段或其它车道上,则要重新计算样条曲线点和连接器走向。 您可以通过每个样条曲线点的 z 偏移输入平面以上的高度 (定义样条曲线点 z 偏移)。 |
| 有超车道 |
有超车道:最内侧车道仅可用于反向车道上的超车进程。这仅适用于含至少两条车道的路段 (创建反向车道超车的模型)。
如果一条路段的超车道和正常车道在相反方向上重叠地足够长,则此重叠区域可用作超车进程。 选择此属性仅用于实际上超车所在的路段。避免实际上不可能发生超车的超车道,例如十字路口区域或交通管制区域。 可为多个与连接器连接且含至少两条车道的连续路段选择此属性。车辆可将这些联系在一起的重叠区域用于超车进程。 如果此超车道对于某个车辆类别禁行,则此类车辆类别的车辆不可将此超车道用于超车进程。 可在超车道上放置其他路网对象,例如测量断面。 超车道不以3D模式显示。 |
此外,此标签还包含下列属性:
| 元素 | 说明 |
|---|---|
| 被阻挡的车辆类别 |
被阻挡的车辆类别:可以为每个车道选择车辆类别,该类别在车道上禁行(路段的属性)。 |
|
不向左变道-所有车辆类型, 不向右变道-所有车辆类型 |
不向左变换车道 – 所有车辆类型和不向右变换车道 – 所有车辆类型: |
| 显示类型 |
车道的彩色显示 (定义路段和构造元素的显示类型) |
|
无向左变道行为-车辆类别, 无向右变道行为-车辆类别 |
不向左变换车道 – 车辆类别和不向右变换车道 – 车辆类别:车辆未在已选择车道上行驶的车辆类别不允许沿行驶方向变换到临近车道上。在 2D 模式和 3D 模式中禁止变换车道显示为实线。 |
| 紧急停车 |
紧急停车距离 (紧急停车距离):如果路径上的车辆用于车道变换行为建模,则默认值 = 最小长度 = 5m。 如果对于紧急停止位置,该连接器前未达到该路段,则车辆停止,直到有足够空隙。从连接器开始处向上游测量。如果车辆必须多次变换车道,则考虑到每条车道 5 m。如果当前车道的编号为奇数,则在紧急停车距离上再加 2.5 m。从而避免,在相同位置有两辆车,在相邻车道上变换车道,从而产生冲突。 示例:车道 1 上的车辆要换到车道 4,以延续其路径。为下个连接器定义 10 m 紧急停车位置。所以,车道 1 的相对紧急停车距离: 10+5+5+2.5 = 22.5 m 车道 2:10+5=15 m 车道 3:10+2.5=12.5 m 实际紧急停止位置是差值计算: 路段的坐标,也就是是连接器开始的地方,减去负紧急停车距离。结果是整数。不考虑小数位。 举例:如果连接器为67.2米且起始于路段的起点,急停为12.5米,则67.2 - 12.5 = 54.7,急停位置为54米。 连接器A 上游紧急停车距离延伸至连接器 B。如果不通向连接器 A 的出发车道,则车辆也不能变换车道。在这种情况下,Vissim 自动向下游平移紧急停车位置至少 0.1 m 直到可以进行必须的车道变换的首个路段。 |
| 合并 |
车道变换的距离 (车道变换的距离):用于路径上的车辆用于车道变换行为建模。 连接器前的距离,从这个位置起车辆通过连接器通向路径,尝试选择车道,无需变道就可以到达连接器。默认值:200 m,最小值 5 m。 数值必须 >= 紧急停车距离 + 5 m。 |
| 每个车道 |
每车道的车道变换距离 (每车道的车道变换距离)
示例:每条车道在连接器前有 200 m 的合并距离,这个距离只从车道 1 出发,车道 3 上的车辆在连接器开始前 400 m 就开始寻找空隙变换车道。 |
| 期望行驶方向 |
方向 (方向):在仿真运行期间,当车辆的路径通过该连接器,并且路径上的所有车辆都可使用路径信息时,车辆上的转向信号灯显示:
没有期望行驶方向和路径的车辆总是驶过条件为所有的下个连接器。如果路段终点没有连接器,则从 Vissim 路网中去除车辆。 |
中观仿真连接器的属性对应路段属性 (路段的属性)。
| 元素 | 说明 | ||
|---|---|---|---|
| 厚度 (3D) |
3D 模式内连接器显示的厚度。 |
||
| 可视化 |
|
||
| 分类显示数值 |
显示分类值: |
||
| 标签 |
|
只针对附加模块动态分配。
| 元素 | 说明 |
|---|---|
| 连接器针对下列车辆类别关闭 | 动态分配中被阻挡的车辆类别 (动态分配中被阻挡的车辆类别):通过列表可以为动态交通分配创建多模式路网模型,方法是在这个连接器上禁行一种或多种车辆类别。这样,连接器就不用于锁定车辆类别车辆选择路径。 |
| 费用 |
每千米每公里费用(每公里费用)。仅与动态分配有关 (使用动态分配附加模块) |
|
附加值1, 附加值2 |
在路径评估中使用的一次性附加费用。用这些数据在动态分配时确定在连接器上行驶的车辆的费用。 |
此外,此标签还包含下列属性:
| 元素 | 说明 |
|---|---|
| 坡度 |
连接器向上坡度或下降坡度的百分比。 下降坡度为负值。 该数值影响通过连接器上的最大加速度和最大减速度影响驾驶行为:
在 3D 模式中默认向上坡度和下降坡度对连接器显示(z 坐标)无影响。可以通过连接器的属性 z-偏移编辑 z 坐标。如果已经在 Vissim 路网中正确说明 z 坐标,可以设置,从 Vissim 中确定向上坡度或下降坡度。为此,必须选择选项根据z坐标值使用坡度 (在路网设置中选择车辆行为)。 |
| 路段评价 |
路段评价激活 (路段评价激活): 区段长度:路段评估的区段长度 |
|
超车速度系数 |
超车速度系数:待超车车辆在超车期间提高至期望速度的系数。默认值 1.3 |
|
下列属性仅与反向车道超车进程建模中的反向车道相关: |
|
| 前视距离 |
超车的前视距离 (超车的前视距离):待超车车辆在此路段反向车道上游方向眺望的距离。车辆可在此距离上观察迎面驶来的车辆。如果在此连接器上有车辆输入或公交线路,则假设在此距离的末端处有一辆迎面驶来的车辆。超车的前视距离越短,超车的概率也就越小。默认值 250 m。 |
| 反向驶来的车辆的假设速度 | 反向驶来的车辆的假设速度:待超车车辆反向车道上车辆的假设速度。反向车辆的假设速度越快,超车的概率的就越小。标准值为 60 km/h。 |
此路网对象类型的属性和属性值在两个关联列表的左侧列表中显示出来。
右侧列表包含路网对象和/或基本数据的属性和属性值,选中的路网对象分配到左侧列表中 (使用关联列表)。这对应路段的属性 (路段的属性)。
 如果选中此选项,则在右行交通中用阴影显示作为超车道的左外侧车道。在左行交通中用阴影显示作为超车道的右外侧车道。
如果选中此选项,则在右行交通中用阴影显示作为超车道的左外侧车道。在左行交通中用阴影显示作为超车道的右外侧车道。
 如果未选中该选项,则在 2D 模式中不可视化显示车辆。这样可以可视化地下通道或隧道。该选项适用于整条连接器。所以,您必须为每条地下通道或隧道定义独立连接器。
如果未选中该选项,则在 2D 模式中不可视化显示车辆。这样可以可视化地下通道或隧道。该选项适用于整条连接器。所以,您必须为每条地下通道或隧道定义独立连接器。