说明 : 您可以在列表中通过选择属性图标 显示和隐藏带有属性值的列 (选择列表的属性和子属性)。
显示和隐藏带有属性值的列 (选择列表的属性和子属性)。
冲突区域的属性影响趋近冲突区域的每辆车的 驾驶行为。所以,车辆可以在既定交通环境中改变意图及其驾驶行为。由此产生的情况可能与已定义属性值有偏差。特别是对于前后两辆车之间的间隔。
您可以在 路网对象类型冲突面域的路网对象列表中编辑冲突面域的所有属性和属性值 (打开列表), (选择列表中的单元)。
|
|
说明 : 您可以在列表中通过选择属性图标 |
1. 进行相应设置:
| 元素 | 说明 |
|---|---|
| 编号 |
唯一编号 |
|
路段 1, 路段 2 |
路段1,路段2:冲突面域所在路段的编号和名称 |
|
可见路段 1, 可见路段 2 |
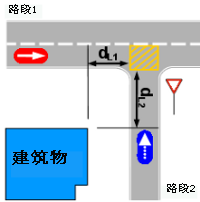
路段1的可见性,路段2的可见性:趋近车辆可以觉察到另一 路段上车辆的最大距离。只要非优先路段上的车辆还远离冲突区域,它就计划尽可能近地停在冲突区域前。避免使用小于1m的数值,否则此车辆无法保持停止。 图中路段2下方的蓝色车辆已抵达某位置,该车辆在此位置可观察路段1上蓝色建筑物后方和左侧红色车辆的视野。所以,路段 2 的视距 = dL2.
|
| 状态 |
用颜色说明优先权:
|
| 前方距离(默认) |
前方距离(默认):
可以根据各种车辆类别输入间距。 下图显示主流车辆离开冲突区域时十字路口的当前情况(不透明车辆)和未来情况(半透明车辆)。次流向内的车辆达到空白冲突区域需要的时间作为前方间距(此处:0.5 s)。
|
|
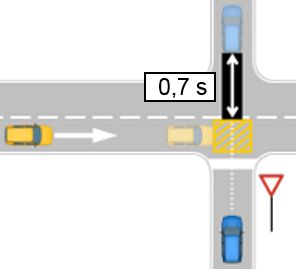
后部距离(默认) |
后部距离(默认):仅针对 十字路口类型:次流向内的车辆后端和主流向内的车辆前端之间的最小时间间隔以秒为单位。当等待前行的车辆已经离开冲突区域,优先行驶的车辆 进入冲突区域前,必须等待的时间。 可以根据各种车辆类别输入间距。 插图显示主流车辆到达冲突区域时当前和未来情况(透明和半透明车辆)。估计次流向内的车辆离开冲突区域后经过的时间作为后方间距(此处:0.7 秒)
|
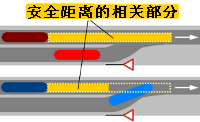
| 安全距离因子 |
安全距离因子:仅针对 汇入路口 类型:该因子与主流向内的车辆的正常期望安全距离相乘,用于确定必须等待的车流完全在汇入路口 类型的冲突区域内必须遵守的最小距离。 可以根据各种车辆类别输入因子。 下图显示了不同系数下的相同情况:上方= 1.0,下方= 0.5。所以,蓝色车辆(下方)还可以驶入,而红色车辆(上方)必须停止。 安全距离的相关部件在图中用黄色标识。
|
| 附加的停车距离 | 附加的停车距离:仅针对必须等待的相关车辆:离开冲突区域上游虚拟停车线的距离,单位为米。所以,必须等待的车辆远离冲突停车,因此至其已经过冲突区域要行驶较长路段。默认值 0 m。 |
| 观测相邻车道 | 观测相邻车道: 如果选中该选项,则驶入的必须等待的车辆要在汇入路口观测想要变换到冲突行驶车道上的主流向内的车辆。该选项降低仿真速度。 如果选中该选项,则驶入的必须等待的车辆要在汇入路口观测想要变换到冲突行驶车道上的主流向内的车辆。该选项降低仿真速度。 |
| 注意路径 | 注意路径:那些必须等待的车辆的比例,它们注意到了主流向的一些车辆,根据路径接近,但之前就已经转弯,因而不会到达冲突区域的情况。数值在 0 到 1 之间。 |
| 避免阻塞 |
避免阻塞:如果优先行驶的车辆占已选中百分比,则车辆检查冲突区域的下游区域并在下列条件下部驶过冲突区域:
|
| MesoGrenzzeitl |
Meso极限时间空隙:在Meso转弯冲突或关联列表节点 - Meso转弯冲突中编辑此数值 (中观转向冲突的属性), (节点的特征属性)。 |
此路网对象类型的属性和属性值在两个关联列表的左侧列表中显示出来。
右侧列表包含路网对象和/或基本数据的属性和属性值,选中的路网对象分配到左侧列表中 (使用关联列表)。可能是以下:
特征属性在上方。