
说明 : 您可以在列表中通过选择属性图标 显示和隐藏带有属性值的列 (选择列表的属性和子属性)。
显示和隐藏带有属性值的列 (选择列表的属性和子属性)。
1. 在菜单基本数据 > 驾驶行为中选择。
列表驾驶行为打开。某些驾驶行为参数集可预先定义。
您可以依据标准编辑此列表 (使用列表)。
您可以在列表中修改所有驾驶行为参数,或者连同以下步骤登记到分录目录中。
|
|
说明 : 您可以在列表中通过选择属性图标 |
2. 请使用鼠标右键点击所需的条目。
3. 请在快捷菜单中选择编辑条目。
窗口车辆行为打开。
4. 选择选项卡跟车行为。
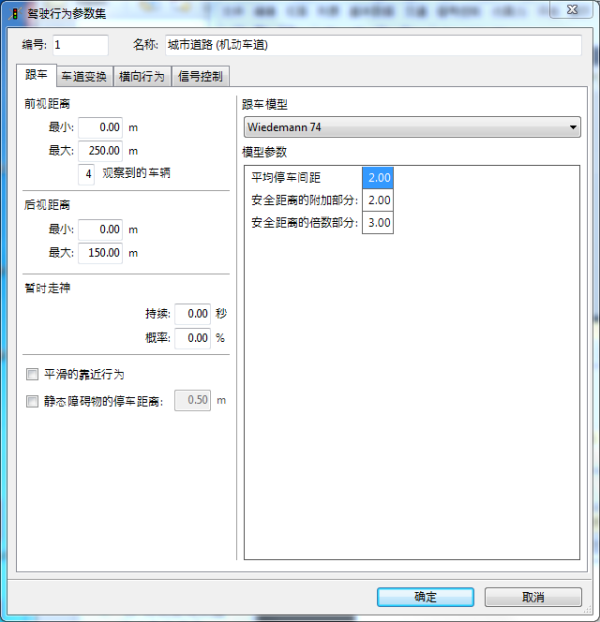
5. 请输入所需的数据。
| 元素 | 说明 | ||
|---|---|---|---|
|
前视距离 |
min., max.: 为了针对前面车辆或相同路段上一侧车辆作出反应,某车辆可以前视的最小和最大距离。除了输入的前面车辆的数目之外,车辆还要考虑前视距离。 在必须考虑车辆横向行为时,最小前视距离才有意义:
例如,在对带有防堵塞系统的轨道交通进行建模时,只须提高最大前视距离(为轨道交通创建闭塞系统)。 |
||
|
前视距离 |
前面车辆:为了针对前面车辆或相同路段上一侧车辆作出反应,某车辆可以前视的前面车辆的数目。除了输入的前面车辆的数目之外,车辆还要考虑前视距离。 车辆还会发现以下路网对象,把它们也当做前面车辆:
这些路网对象的作用与一个红色信号灯相同。多个此类路网对象处于较短的距离内时,需要提高前面车辆的数目。 这样会稍微提高仿真的计算时间。 必须立即停止时,车辆会发现以下路网对象,比如前面车辆:
冲突区域中的行为:车辆会考虑与前面车辆之间的所有冲突区域,这规定了前面车辆的数目。 |
||
|
后视距离 |
min., max.: 为了针对相同路段上的后面车辆作出反应,某车辆可以后视的最小和最大距离。 在必须考虑车辆横向行为时,最小后视距离才有意义: 如果能够在车道内进行超车,则根据速度大小输入大于零的数值,例如:市内 20-30 m,在市郊则输入更大的数值。这样就可以避免车辆彼此穿过,如果希望将多于前面车辆 属性中规定数量的车辆置于停车线前。这尤其适用于自行车。 您可以在小孔路网中减小最大后视距离,例如在存在四个相互之间距离很小的路段连接器的路网中。这有利于提高仿真速度。 |
||
|
暂时注意力不集中 |
持续时间:注意力不集中的持续时间,在这期间,车辆未针对前面行驶的车辆作出反应。但是,车辆会对紧急刹车作出反应。 概率:注意力不集中的出现频率 随着数值的升高,相关路段的通行能力会降低。 |
||
|
平滑的靠近行为 |
|
||
|
静态障碍物的停车距离: |
静态障碍物逆流而上的停车距离 (ax),例如信号灯头、停车标志、车站、优先规则、冲突区域。不适用于停车场的停车标志。必须选择属性匀速靠近。
|
||
|
跟车模型 |
适用于跟车行为的跟车模型。根据所选的跟车模型修改模型参数。
|
||
|
模型参数 |
根据所选的跟车模型显示不同的参数(定义 Wiedemann 74 模型参数), (定义 Wiedemann 99 模型参数)。这些模型参数会影响饱和流量。 |
 如果勾选了该选项,车辆将会在靠近静止障碍物时更为稳定地减小其速度。在与静止障碍物之间的距离为
如果勾选了该选项,车辆将会在靠近静止障碍物时更为稳定地减小其速度。在与静止障碍物之间的距离为 如果勾选了该选项,被超越的车辆就会使用正常的跟车行为,直至前面车辆的速度降至小于 1 m/s,差不多停止。在这之后,被超越的车辆才会计算其它的靠近行为。此外,靠近行为还可能导致短时的加速。
如果勾选了该选项,被超越的车辆就会使用正常的跟车行为,直至前面车辆的速度降至小于 1 m/s,差不多停止。在这之后,被超越的车辆才会计算其它的靠近行为。此外,靠近行为还可能导致短时的加速。