说明 : 您可以在列表中通过选择属性图标 显示和隐藏带有属性值的列 (选择列表的属性和子属性)。
显示和隐藏带有属性值的列 (选择列表的属性和子属性)。
1. 在菜单基本数据 > 驾驶行为中选择。
列表驾驶行为打开。某些驾驶行为参数集可预先定义。
您可以依据标准编辑此列表 (使用列表)。
您可以在列表中修改所有驾驶行为参数,或者连同以下步骤登记到分录目录中。
|
|
说明 : 您可以在列表中通过选择属性图标 |
2. 请使用鼠标右键点击所需的条目。
3. 请在快捷菜单中选择编辑条目。
窗口车辆行为打开。
4. 选择选项卡车道变换。
您可以在列表驾驶行为或通过菜单基本数据 > 驾驶行为对已经定义的路网对象进行编辑。
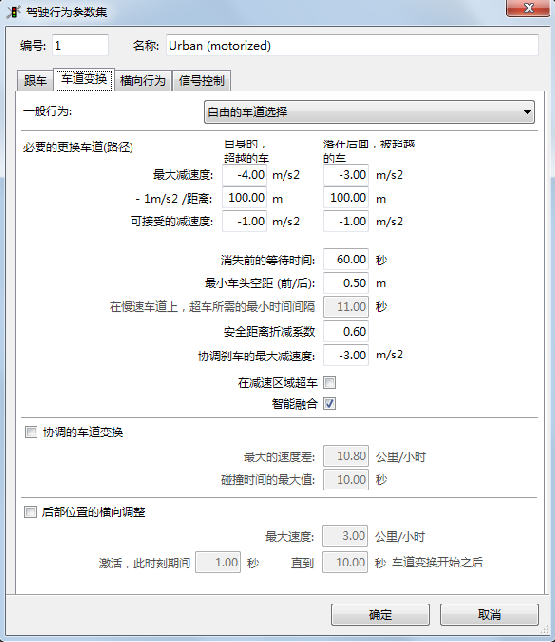
5. 进行相应设置:
|
区域 / 属性 |
说明 |
|---|---|
|
一般行为 |
车道变换规则 (车道变换规则):
您可以通过协调的车道变换行为 对一般行为进行更为切合实际地建模,而不必考虑所选的选项。 |
|
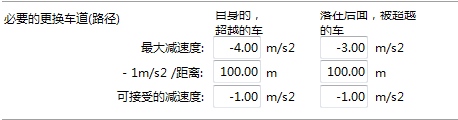
必要的车道变换(路径) |
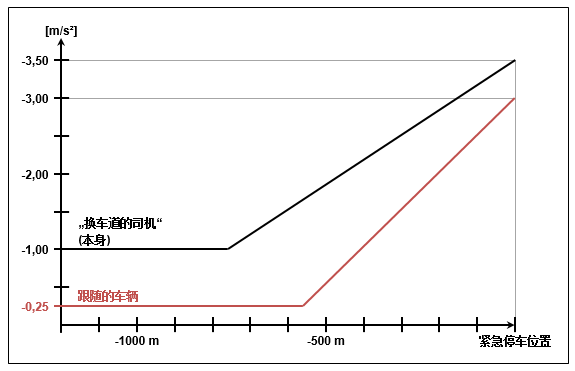
举例来说,以下参数会得出下面所示的曲线:
图例: 1 黑线:变道(自有) 2 红线:跟随车辆 3:急停位置
|
|
消散之前的等待时间 |
消散之前的等待时间:车辆在急停位置上等待至必要的变换车道之前所需的最大时间。达到该时间后,将车辆从路网中取出,与此同时,在文件 *.err 中会记录一个警告。 |
|
最小车头时距 (前/后) |
最小车头时距:变道后两辆车之间必须具有的最小间距,默认为0.5米。对于在流动交通中变换车道,与速度相关的安全间距要求两车之间需要具有更大的最小间距。 |
|
当存在碰撞时间时,在慢速车道上 |
自由行驶时间 (自由行驶时间): 仅在慢车道规则 或 快车道规则中:为了确保待超车车辆能够变道至慢车道上,以秒为单位定义了与慢车道上前面车辆之间必须存在的最小距离。 |
| 安全距离折减系数 |
安全距离折减系数(变换车道), (安全距离缩减因子(车道变换)):在每次变道时均需考虑。涉及以下参数:
变道期间,Vissim 会将安全距离减小至通过以下乘法得出的数值: 原始安全距离 • 安全距离折减系数 这样一来,就可以利用标准值 0.6 将安全距离减少40 %。一旦变道过程结束,就需要重新考虑原始安全距离。 |
|
协同刹车的最大减速度 |
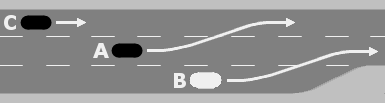
协同刹车的最大减速度 (最大协调减速度): 说明了,被超越车辆A 是否会协同刹车,以便使前面行驶的车辆 B 能够变道至自己的车道中。如果被超越车辆 A 意识到,在前面车辆B准备变道时,其制动值必须大于规定的数值,则会中断或不开始协同刹车。数值越高,制动力就越强,变道概率也就越大。前面车辆会在变道时考虑安全距离折减系数以及跟车模型的参数。针对最大减速度的建议数值为地面加速度的 70-100 % (9.81 m/s²,32.2 ft/s²)。
协调刹车时,车辆以下列数值进行制动:
|
| 在减速区域超车 |
在减速区域超车 (在减速区域超车): 默认不勾选该选项。
|
| 提前并道 | 提前并道 (提前并道): 默认在新输入路网的驾驶行为参数集中勾选该选项。 在路径下一路段之前的每次变道时,均须考虑该选项。
为了实现所需的车道变换规则,也要勾选相应的选项:
|
| 在车辆路径决策后,向下游寻找路径终点 |
车辆路径决策点预测 (车辆路径决策点预测): |
| 协调车道变换 |
协调车道变换 (协调车道变换): 如果车辆A发现,前面行驶的车辆 B想要从相邻车道上变到A 所在车道上,那么车辆A 就会试图变到下一车道上,以方便车辆B的变道。举例来说,如果车辆B 想要从一个汇流车道上朝左变到右车道上,那么车辆A 就会从右车道变到左车道上。
在所述的变道过程中,车辆A 的表现就如同,在路段连接器距离较远的基础上必须进行变道时的情况。在此,接受特有的最大减速度 并且新车道上被超越车辆C 的减速度与必须变道时的参数相符。 满足以下条件时,车辆 A 不能完成协同变道过程:
|
| 后部位置的横向调整 |
横向位置的后部调整 (横向位置的后方校正): 如果变道以低于最大速度 栏目中设定的速度进行,那么车辆后部向侧面移动。这可以补偿后部调整。这样一来,在变道结束时车辆就会平行于车道中心,并端正地位于原始车道上。后部位置的横向调整会直接影响通行能力。 只有在横向行为驾驶行为参数中激活选项与相邻车道上的车辆保持横向间距时,才需要考虑后部位置的横向调整(编辑横向行为时的驾驶行为参数).
|
上层主题:

 如果勾选了该选项,就可以对取决于车道的速度限制进行建模,并在车辆变道时考虑到这一点。
如果勾选了该选项,就可以对取决于车道的速度限制进行建模,并在车辆变道时考虑到这一点。 如果未勾选该选项,车辆就不能直接从减速区域逆流而上地开始一个自由变道过程。另外,它还会完全忽略新车道上的减速区域。
如果未勾选该选项,车辆就不能直接从减速区域逆流而上地开始一个自由变道过程。另外,它还会完全忽略新车道上的减速区域。