
说明 : 您可以在列表中通过选择属性图标 显示和隐藏带有属性值的列 (选择列表的属性和子属性)。
显示和隐藏带有属性值的列 (选择列表的属性和子属性)。
默认情况下,Vissim 中的车辆应使用车道的整个宽度。您可以在横向行为的驾驶行为参数中定义,车辆是否能够车道的左边,右边,或者中间,或者在未规定侧向对齐的情况下行驶。如果车道足够宽并且允许超车,那么就可以在车道内部进行超车。如果超车车辆的最大减速度妨碍了及时刹车,则根据可能性超越其它车辆,即使在驾驶行为参数考虑下一个转向的方向 和最小的横向距离 的基础上不允许超车。违规超车会导致碰撞现象。
此外,在已勾选选项与相邻车道上的车辆保持横向间距时,也要考虑这些设置。
1. 在菜单基本数据 > 驾驶行为中选择。
列表驾驶行为打开。某些驾驶行为参数集可预先定义。
您可以在列表中修改所有驾驶行为参数,或者连同以下步骤登记到分录目录中。
|
|
说明 : 您可以在列表中通过选择属性图标 |
您可以依据标准编辑此列表 (使用列表)。
2. 请使用鼠标右键点击所需的条目。
3. 请在快捷菜单中选择编辑条目。
窗口车辆行为打开。
4. 选择横向行为选项卡。
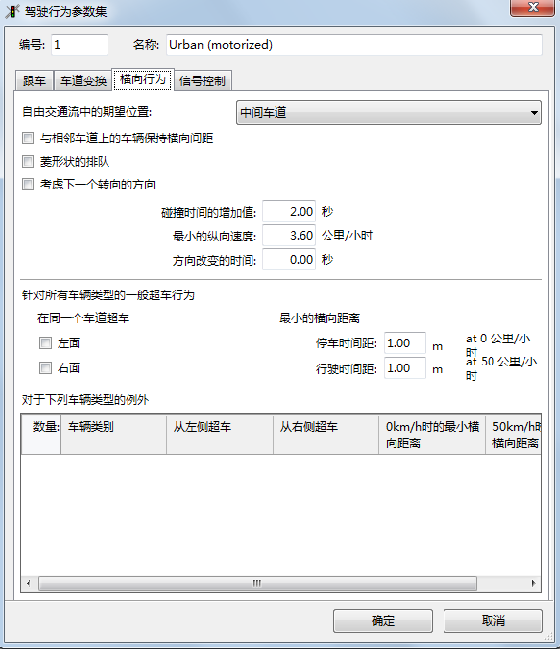
5. 进行相应设置:
| 元素 | 说明 | ||
|---|---|---|---|
| 自由行驶时的期望位置 |
自由行驶时期望的横向位置 (WunschQuerPos): 在自由的交通流中,车辆在其车道内部侧向对齐 |
||
| 与相邻车道上的车辆保持横向间距 |
观测相邻车道 (观测相邻车道):
|
||
| 菱形排队 |
菱形排队: |
||
| 考虑下一个转向的方向 |
NächAbbBerück: 针对不按车道行驶的交通,改进了上游转弯时横向行为的建模过程。 考虑车辆路径上下一路段连接器的属性期望行驶方向 向左 / 向右 / 所有(所有 = 直行)(连接器的属性)。
应始终将车辆路径中下一、具备期望方向向左或向右的路段连接器看作是相关的路段连接器。如果车辆处于该路段连接器的排列 距离内,并且路段连接器中具有足够的位置,那么车辆就会朝向其所在车道的一侧。与此同时,应避免未处于相同路段连接器中或提前朝该方向转弯的车辆超越处于该侧车辆,因为这样会导致下一交叉口处出现碰撞现象。
|
||
| 碰撞时间的增加值 |
碰撞时间的最小增加值 (碰撞时间的最小增加值): 与下一车辆或信号灯头之间碰撞时间内减速度的最小值,必须通过车道上的侧向运动实现该减速度,以便将其作为建议值使用并进行减速。根据车辆的期望速度计算碰撞时间。碰撞时间内减速度的标准值为 2 秒。较小的数值会导致更为活跃地横向行为,因为车辆会为为获得较小改善就进行侧向偏转。 |
||
| 最小纵向速度 |
横向运动的最小纵向速度 (横向行为的最小纵向速度): 纵向速度的最小值,该数值仍允许侧向运动。在车辆即将停止时,您可减小使车辆做侧向运动的默认值 1 km/h。 |
||
| 换向之间的时间 |
换向之间的最短时间(横向行为) (横向变向行为—最小时间): 默认值 0.0 s:确定了,从开始某个方向上的横向运动到开始相反方向上的横向运动必须至少经过多少仿真时间。该数值越大,车辆的侧向运动就越小。仅在允许在同车道内超车时才会发生侧向运动。变道时的横向运动不受该参数的影响。 |
||
| 在同车道内超车时的默认行为 |
适用于所有车辆类别,但在下列类别车辆超车时的例外情况部分登记的车类除外。
针对不同于 0 km/h 和 50 km/h 的速度,通过线性插补方式计算最小距离。 |
||
| 下列类别车辆超车时的例外情况 |
定义在某些车辆类型超车时的不规范行为 1. 请使用鼠标右键点击此列表。 2. 请在快捷菜单中选择 新建条目。 插入一个带有默认数据的新行。3. 进行相应设置:
|
 如果选中该选项,车辆就会考虑位置以及相邻车道中车辆的侧向对齐情况并遵守
如果选中该选项,车辆就会考虑位置以及相邻车道中车辆的侧向对齐情况并遵守 如果未勾选该选项,则忽略相邻车道上的车辆,即使它比所在的车道还宽的情况,除非它正在变道。
如果未勾选该选项,则忽略相邻车道上的车辆,即使它比所在的车道还宽的情况,除非它正在变道。