Zielführung von Fahrzeugen definieren
Sie können mit der Zielführung Fahrzeuge während der Fahrt neue Wege zu einem Zielparkplatz suchen lassen. Damit können Sie die Wirkungsweise von Zielführungssystemen abbilden.
Standardmäßig wählen Fahrzeuge in der dynamischen Umlegung den Weg zu ihren Zielparkplätzen im Moment der Abfahrt vom Quellparkplatz. Dabei basiert die Wegewahl auf den generalisierten Kosten aus den vorangegangenen Simulationsiterationen (Verfahren der Wegewahl mit oder ohne Wegesuche). Bei der Zielführung basiert die Wegewahl auf der aktuellen Verkehrssituation in der laufenden Iteration. Dabei wird die Reisezeit vom letzten abgeschlossenen Zeitintervall verwendet.
Während Sie Dynamische Routenentscheidungen an einer gewünschten Position im Netz platzieren müssen, suchen Fahrzeuge mit Zielführung nach einem Zielführungstakt neue Wege von ihrer aktuellen Position. Den Zielführungstakt geben Sie ein. Die Zielführung löst dabei die Suche nach dem besten Weg zum Zielparkplatz aus.
Das Zielführungssystem ordnen Sie Fahrzeugtypen zu (Fahrzeugtypen verwenden).
Die Zielführung berücksichtigt keine Mautrouten. Maut-Routenentscheidungen wirken nicht auf die Zielführung.
1. Wählen Sie im Menü Verkehr > Dynamische Umlegung > Parameter.
Das Fenster Dynamische Umlegung: Parameter öffnet sich.
2. Wählen Sie das Register Zielführung.
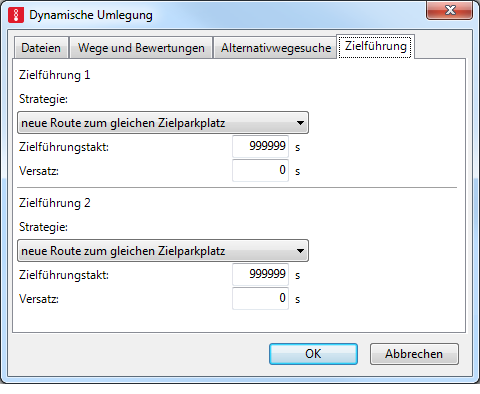
3. Nehmen Sie die gewünschten Einstellungen vor:
| Element | Beschreibung |
|---|---|
|
Zielführung 1 Zielführung 2 |
Sie können zwei verschiedene Zielführungssysteme abbilden. Für jedes Zielführungssystem können Sie die Strategie, den Zielführungstakt und die Versatzzeit eingeben. |
|
Strategie |
Ziel auswählen:
|
|
Zielführungstakt |
Zeitintervall in Sekunden, nach dem ein neuer Weg gesucht wird |
|
Versatzzeit |
Zeitraum von Verarbeitungszeiten und Laufzeiten von Meldungen realer Zielführungssysteme. Dadurch können die Reisezeiten der Zielführung von den Reisezeiten des aktuellen Bewertungsintervalls abweichen. |
4. Bestätigen Sie mit OK.
