Funktionsweise des Fahrzeugfolgemodells
Fahrzeuge werden im Netz mit Hilfe eines Verkehrsflussmodells bewegt. Die Qualität des Verkehrsflussmodells ist wesentlich für die Güte der Simulation. Im Gegensatz zu einfacheren Modellen, in denen weitgehend konstante Geschwindigkeiten und ein deterministischer Folgevorgang von Fahrzeugen vorausgesetzt werden, verwendet Vissim das psycho-physische Wahrnehmungsmodell von Wiedemann (1974) (Fahrzustände im Verkehrsflussmodell nach Wiedemann). Die Grundidee des Modells basiert auf der Erkenntnis, dass der Fahrer eines schneller fahrenden Fahrzeuges bei Erreichen seiner individuellen Wahrnehmungsschwelle zum vorausfahrenden Fahrzeug zu bremsen beginnt. Da der Fahrer die Geschwindigkeit des vorausfahrenden Fahrzeugs nicht genau einschätzen kann, sinkt seine Geschwindigkeit unter dessen Geschwindigkeit, so dass er wiederum nach Erreichen einer Wahrnehmungsschwelle leicht beschleunigt. Es kommt zu einem ständigen leichten Beschleunigen und Verzögern. Das unterschiedliche Verhalten der Fahrer wird mit Verteilungsfunktionen über das Geschwindigkeitsverhalten und Abstandsverhalten berücksichtigt.
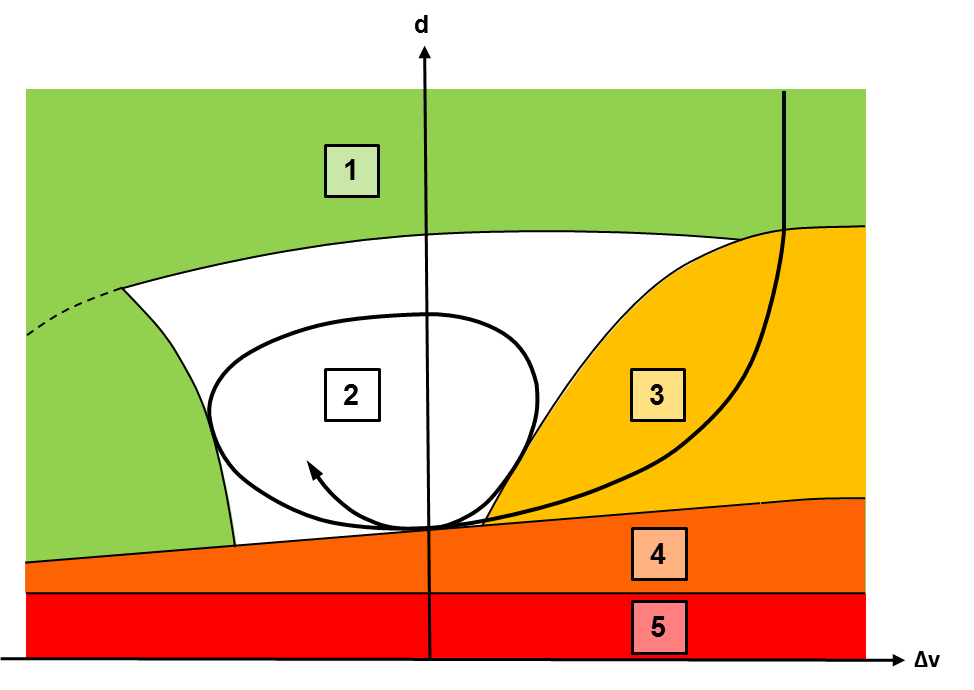
Fahrzeugfolgemodell (nach: Wiedemann 1974)
Legende
| Achsen: d: Abstand, Δv: Änderung der Geschwindigkeit | 3: Annäherungsbereich |
| 1: Bereich "freies Verhalten" | 4: Bremsbereich |
| 2: Folgebereich | 5: Kollisionsbereich |
Das Fahrzeugfolgemodell wurde anhand zahlreicher Messungen am Institut für Verkehrswesen der Universität (TH) Karlsruhe (seit 2009 KIT – Karlsruher Institut für Technologie) geeicht. Messungen neueren Datums stellen sicher, dass mittlerweile geändertes Fahrverhalten und technische Möglichkeiten der Fahrzeuge korrekt abgebildet werden.
Die Beschleunigung des Fahrzeugs bei freier Fahrt und einer Geschwindigkeit unterhalb der Wunschgeschwindigkeit berechnet Vissim auf folgender Basis:
- Falls der aktuelle Abstand dem Wunschsicherheitsabstand entspricht, beschleunigt das Fahrzeug auf die Geschwindigkeit des vorausfahrenden Fahrzeugs. Falls die eigene Wunschgeschwindigkeit niedriger ist, beschleunigt das Fahrzeug auf diese.
- Falls der Abstand zwischen 100 % und 110 % des Wunschsicherheitsabstands liegt, wird die Zielgeschwindigkeit linear interpoliert.
- Falls der Wunschsicherheitsabstand größer 110 % ist, beschleunigt das Fahrzeug auf seine Wunschgeschwindigkeit.
Bei mehrstreifigen Fahrbahnen berücksichtigt ein Fahrer im Vissim-Modell nicht nur die vorausfahrenden Fahrzeuge (standardmäßig 4 Fahrzeuge), sondern auch die Fahrzeuge auf den beiden Nachbarfahrstreifen. Zusätzlich führt eine Lichtsignalanlage etwa 100 m vor Erreichen der Haltlinie zu einer erhöhten Aufmerksamkeit beim Fahrer.
In Vissim werden sogenannte Fahrer-Fahrzeug-Einheiten durch ein Netz bewegt. Jeder Fahrer verfügt über Verhaltensparameter, mit denen er einem bestimmten Fahrzeug zugeordnet ist. Damit stimmt das Verhalten der Fahrer mit den technischen Möglichkeiten des Fahrzeugs überein. Die Attribute, die eine Fahrer-Fahrzeug-Einheit charakterisieren, lassen sich in folgende Kategorien untergliedern:
- Technische Spezifikation eines Fahrzeuges, beispielsweise:
- Fahrzeuglänge
- Höchstgeschwindigkeit
- Beschleunigungsvermögen
sowie:
- aktuelle Fahrzeugposition im Netz
- aktuelle Geschwindigkeit und Beschleunigung
- Verhalten einer Fahrer-Fahrzeug-Einheit, beispielsweise:
- psycho-physische Wahrnehmungsgrenzen des Fahrers, beispielsweise Schätzvermögen, Sicherheitsempfinden, Risikobereitschaft
- Gedächtnis des Fahrers
- Beschleunigung in Abhängigkeit von der aktuellen Geschwindigkeit und der Wunschgeschwindigkeit des Fahrers
- Abhängigkeit zwischen Fahrer-Fahrzeug-Einheiten, beispielsweise:
- Verknüpfung zu vorausfahrenden und nachfolgenden Fahrzeugen auf dem eigenen und den benachbarten Fahrstreifen
- Hinweise auf den aktuell benutzten Netzabschnitt und den nächsten Knotenpunkt
- Hinweise zum nächsten Lichtsignal
