Defining the destination parking lot selection
The traffic demand in the origin-destination matrices refer to the zones for origins and destinations. Zones are represented in Vissim via one or more parking lots. If more than one parking lot is located in the destination zone of a driver, the driver must choose the destination parking lot before choosing his/her path.
Thereby, the destination parking lot selection is an additional example of the problem class Discrete Selection (Differences between static and dynamic assignment). The reason for this is there are many alternatives: a utility function and a decision function (Base for calculating the dynamic assignment), (Calculation of paths and costs). For the vehicle type used by the driver, you may enter a utility function coefficient for each of three decision situations that trigger a parking lot search (Entering coefficients for utility function of parking lot). Calculation of the utility function is also based on the attributes Parking fee and Attraction of the parking lots (Attributes of parking lots).
For destination parking lot selection a Logit formula is used (Method of path selection with or without path search). The Logit forumula contains a scaling factor that you can specify (Defining the Logit function scaling factor).
Destination parking lot selection depends on the following settings made in the parameters of dynamic assignment, on the Cost tab, in the section Cost for path distribution with Kirchhoff. This also applies for destination parking lot selection for dynamic routing decisions (Defining dynamic routing decisions):
- If Measured path travel times is selected, destination parking lot selection uses generalized costs of paths from the second simulation run. For the first simulation run, the total of edge lengths is used, as there is still no data available on the travel time. From the start of the edge, the distance from the end of the origin parking lot to the first node border is taken into account. From the end of edge, only the distance from the last node border to the beginning of the destination parking lot is considered.
- If the Sum of edge travel times is selected, the entire length of all edges is used.
Definition of the utility function of a parking lot

|
Coefficient |
Formula symbol |
Description |
Description |
|---|---|---|---|
|
|
CParking
|
Parking Cost |
Parking fee listed as Parking fee attribute of the parking lot |
|
|
Attraction |
Attraction |
Attraction listed as Attraction attribute of the parking lot |
|
|
DDestination |
Distance from desired zone |
Straight-line distance between the position of the parking lot and the center of the destination zone |
|
|
DVeh |
Distance from current position |
Generalized costs of the cheapest path from the current location (vehicle position) |
|
|
fs |
Current parking availability |
Availability of free parking spaces |
|
k |
|
Index of Vehicle type |
|
|
s |
|
Index of Decision Situation, Departure, Routing Decisions, RouteGuidance cycle 1 or RouteGuidance cycle 2 |





For the utility function the following applies:
- positive coefficient for Attraction and for Current parking availability
- negative coefficient for Parking Cost, Distance from desired zone and Distance from current position
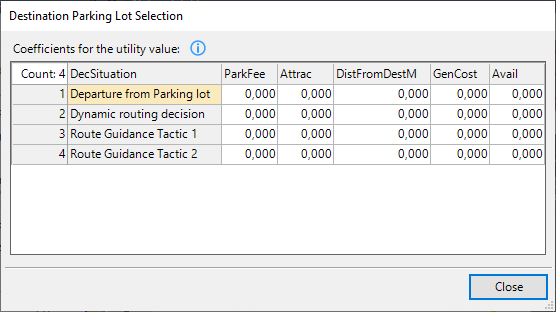
Entering coefficients for utility function of parking lot
You may enter individual utility function coefficients for each vehicle type and each of the three following decision situations. Coefficients are weighting factors for the smallest possible generalized cost of a path, from the current vehcile position to the destination parking lot. You can show the coefficient values entered in the Vehicle types list, in the GenCost (generalized costs) attribute.
- Departure from Parking lot: when a vehicle begins its trip in the origin parking lot
- Dynamic routing decision: when a vehicle passes a dynamic routing decision
- Route Guidance Tactic 1, Route Guidance Tactic 2: when a vehicle with a route guidance system receives new information
The number of the permissible destination parking lots to the time of the departure is the number of parking lots which belong to the destination zone and are open at the time of the departure. For decisions, which are triggered by a dynamic routing decision or a route guidance system, the selected quantity depends on the set strategy (Attributes for the trip chain file, matrices, path file and cost file).
1. On the Base Data menu, click > Vehicle Types.
The Vehicle Types list opens.
2. Right-click the vehicle type of your choice.
3. On the shortcut menu, click Edit.
The Vehicle Type window opens.
4. Select the Special tab.
5. Click the Destination Parking Lot Selection button.
The Destination Parking Lot Selection window opens. In the next step, to select multiple entries, hold down the Ctrl key.
6. In the list, click the desired decision situation (DecSituation).
7. Into the list boxes, enter the desired coefficients.
|
|
Note: After multiplication by the Logit scaling factor, the difference of the largest and smallest utility function value should be no larger than 4. If the difference of the utility value is 4, the probability of the selection of a better parking lot is 55 times as much as the probability that a worse parking lot will be selected. Note: Select the negative coefficient for:
Note: Select the positive coefficient for:
|

|
|
Warnings:
In both cases, a warning is saved to the *.err file and the Messages window. |

When the use of all parking lots has been defined in the selected quantity, the selection probability is calculated with the Logit function.
8. Confirm with OK.
Calculation of parking spaces currently available
The ratio of available parking spaces of considered parking lots to the largest number of available spaces in the entire selection of parking lots equals the number of parking spaces currently available.
Distance from other destination zone
Although parking lots lie in zones, the information distance from destination zone is required, for example when all parking spaces of the destination zone are occupied. In such decision situations, parking lots that do not belong to the destination zone may become potential destination parking lots. Then Vissim shall choose a parking lot in a different zone as destination parking lot, preferably one which is close by.
The location of a zone is calculated from the mean of the coordinates of the parking lot of the zone and can be displayed as an attribute Center in the list of Zones (Traffic menu).
Defining the Logit function scaling factor
1. On the Traffic menu, click > Dynamic Assignment > Parameters.
The Dynamic Assignment: Parameters window opens.
2. Select the Choice tab.
3. In the section Destination Parking Lot Selection, enter the desired values:
|
Element |
Description |
|---|---|
| Logit scaling factor | The Logit scaling factor μ determines how strongly the distribution responds to utility differences (Method of path selection with or without path search). |
| Logit lower limit | If the selection probability of a parking lot lies below this value, the parking lot is not selected as destination parking lot. This increases the selection probability for the remaining parking lots. |
