Editing the driving behavior parameter driver error
In the simulation, you can take various driver errors into account:
- Drivers’ temporary loss of attention means that the vehicle does not to react to the vehicles preceding it (Temporary lack of attention during following).
- Temporary distraction of the driver causes a deviation in the lateral position of the vehicle (Defining driver errors due to distraction of the driver).
- Temporarily misjudging the speed of other vehicles affects calculation of a gap in the major flow as well as various conflict situations (Temporarily misjudge the speed of other vehicles).
- If you reduce the number of interaction objects that the vehicle perceives, you can simulate loss of attention at intersections. To do so, set conflict areas to be perceived as interaction objects (Modeling loss of attention at intersections).
- If the vehicle exceeds a critical speed in a bend, this can cause the vehicle to understeer and drift sideways. For this driver error, in addition to the driving behavior, define a drift speed, a critical speed and a radius at the relevant point of the link (Using lateral drift speed), (Defining curve speed), (Attributes of links).
1. On the Base Data menu, click > Driving Behaviors.
The Driving Behaviors list opens. Some driving behavior parameter sets can be predefined.
By default, you can edit the list (Using lists).

|
Note: In lists, you can use the |

2. Right-click the entry of your choice.
3. On the shortcut menu, click Edit.
The Driving Behavior window opens.
4. Select the Driver Errors tab.
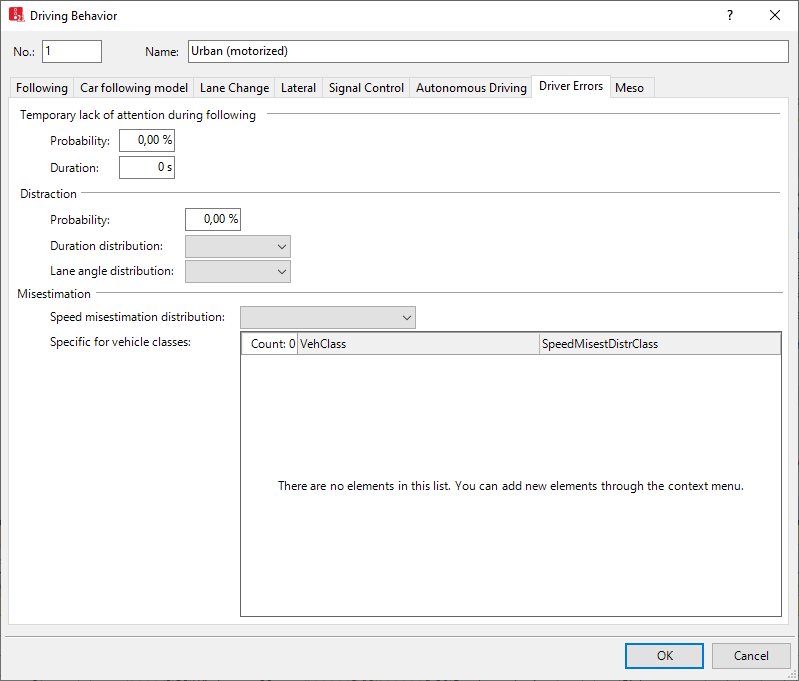
5. Edit the attributes of the desired driver error:
Temporary lack of attention during following
You can take into account in the simulation that the driver of a vehicle temporarily only reacts to emergency braking of any vehicles ahead. With increasing values, the capacity of the affected links decreases. If an automatic speed limitation takes effect in curves, the driver shows a normal behavior, he or she is not temporarily inattentively.
| Element | Description |
|---|---|
|
Probability |
Temporary lack of attention - sleep probability: frequency of lack of attention |
|
Duration |
Temporary lack of attention - sleep duration (SleepDur): Period of time during which vehicles do not react to a preceding vehicle. They do react however to emergency braking. |
Defining driver errors due to distraction of the driver
For a simulation, you can take into account that drivers of vehicles are temporarily distracted and this causes a lateral deviation of the vehicle. You can edit the following attributes for the driving behavior:
| Element | Description |
|---|---|
|
Probability |
Distraction probability (DistractProb): Probability with which a vehicle unintentionally changes its lateral position within a simulation second and has an impact on the attributes Distraction duration distribution and Distraction lane angle distribution. The vehicle then returns to its desired lateral position. Value range 0 - 100 |
|
Duration distribution |
Distraction duration distribution (DistractDurDistr): Distribution for time period during which the lane angle of the vehicle changes based on the value Distraction lane angle distribution value (Using time distributions) |
|
Lane angle distribution |
Distraction lane angle distribution (DistractLnAngleDistr): Distribution for the angle at which the vehicle deviates relative to the middle of the lane (Using general distributions). Value range radian: 0 rad to 1.5 rad. |
Once the three attributes have been selected and the driving behavior affects the vehicle, the vehicle will change to the distracted state under the following conditions:
- For the driving behavior, the Distraction probability has been set to > 0.
- The Duration distribution has been specified.
- The Lane angle distribution has been specified.
In these cases, Vissim draws a random number between 0 and 100 with each time step. If this random number is less than
Distraction probability divided by Simulation resolution Time step(s) / simulation second
Vissim draws a random value Alpha from the Lane angle distribution as well as a random value t from the Duration distribution. For the next t simulation seconds, the vehicle moves sideways with the Alpha angle, relative to the lane center. It moves independently of all vehicles on the link and of the shoulder of the road. Vissim determines the direction of deviation (right or left) randomly. After time t, the vehicle automatically moves back to its set Desired position at free flow (Editing the driving behavior parameter Lateral behavior). Until the vehicle has reached this desired position, you cannot start a new distraction.
The following applies for the duration of the distraction:
- Acceleration of the vehicle is constant.
- The vehicle ignores all other vehicles and network objects, such as signal heads, priority rules, conflict areas, stop signs.
- If for the driving behavior of vehicles on adjacent lanes, for lateral behavior, Observe adjacent lanes is not selected, these vehicles completely ignore the lateral deviation of the distracted vehicle. It is treated as if it were still in its lane.
The vehicle attribute Lateral deviation (distraction) indicates the lateral deviation in the current time step (Displaying vehicles in the network in a list).
Temporarily misjudge the speed of other vehicles
In the simulation, you can take into account the fact that drivers temporarily misjudge the speed of other vehicles. The speed misestimate distributions attribute is effective, for example, when calculating time gaps at priority rules and conflict areas as well as when changing lanes to overtake in oncoming traffic.
1. Make sure that at least one empirical free distribution with the following properties is defined (Using general distributions):
| Attribute | Description |
|---|---|
| x |
Factor multiplied by the current speed of the other vehicles. The fracttile for this factor is constant for each vehicle during its entire time in the network. This means that some vehicles will always overestimate speeds, while other vehicles will always underestimate speeds. Vehicles with a factor x unequal to 1 additionally ignore the current and future acceleration of other vehicles at conflict areas and estimate their future course of travel only on the basis of their current speed times the factor x. |
| y |
Cumulative probability for all values up to x. The vehicle affected by a speed misestimate underestimates or overestimates the speed of other vehicles during a simulation run. During a simulation run, the vehicle does not vary between overestimating and underestimating the speed of other vehicles. |
2. In the Misestimation section, under the attribute Speed misestimate distribution, select the free distribution you want to use as default for driving behavior vehicles:
| Long name | Short name | Description |
|---|---|---|
|
Speed misestimate distribution (default) |
SpeedMisestDistrClass |
Distribution for the probability of the extent of misjudgement of the speed of other vehicles. Returns values >= 0. |
Distribution is only effective in the following conflict situations:
- Conflict areas that have an vehicle-to-vehicle effect. Vissim recalculates the gaps. If the value x of the selected general distribution for the vehicle is not equal to 1, the vehicle ignores the current and future acceleration and deceleration of other vehicles. The vehicle only takes into account the result of multiplying the current speed of the vehicles and the x factor.
- Priority rules: The vehicle evaluates whether the minimum time gap and time gaps at the conflict marker are sufficiently large. Speeds of other vehicles are multiplied by the factor of the Speed misestimate distribution. The vehicle is then re-assesses the situation and reacts to the priority rule. The vehicle cannot misjudge the speed of reversing vehicles. When a vehicle reverses, it may misjudge the speed of vehicles approaching from upstream.
- Overtaking in the opposing lane: Vissim uses the oncoming vehicle’s current speed. If no oncoming vehicle is visible, the value of the Assumed speed of oncoming traffic attribute defined on the link is used.
- Lane changes
3. Carry out the following steps for all vehicle categories for which a different Speed misestimate distribution shall apply:
4. Right-click in the Exception for vehicle classes list.
5. On the shortcut menu, click Add.
6. Select the Vehicle class and the desired Speed misestimate distribution to apply to it.
7. Confirm with OK.
If the driving behavior of a vehicle contains a specific distribution for a vehicle class to which the vehicle type of an observed vehicle belongs, then this distribution is used, otherwise the default distribution, if it is specified.
Modeling loss of attention at intersections
You can cause the vehicle to perceive conflict areas as interaction objects. The vehicle will then perceive fewer other interaction objects, as the number of interaction objects it can perceive is limited (Editing the driving behavior parameter Following behavior).
- ► Make sure that in the Driving behavior list, the following column is displayed:
| Element | Description | |
|---|---|---|
|
ConflArAsInteractObj |
Conflict areas count as interaction objects: |
|
 If this option is selected, the vehicle considers conflict areas as interaction objects when it approaches them.
If this option is selected, the vehicle considers conflict areas as interaction objects when it approaches them.Superordinate topic:
