感知器の属性
ネットワークオブジェクトを挿入する際、オブジェクト作成後に [編集] ダイアログが自動的に開くよう設定している場合は、[Detectors]-[感知器] ウィンドウが自動的に開きます (オブジェクト作成後の右クリックの挙動と操作)。デフォルトでは、[Detectors]-[感知器] リストのみが開きます。
このウィンドウには、ネットワークオブジェクトの属性値を入力します。すでに定義済みのネットワークオブジェクトには、次の機能を使用してウィンドウを呼び出すことができます。
- ► ネットワークオブジェクトタイプのネットワークオブジェクトのリストで、目的のネットワークオブジェクトがある行をダブルクリックします。
- ► ネットワークエディタで、目的のネットワークオブジェクトを選択します。次に、そのショートカットメニューから、[Edit]-[編集] をクリックします。
ネットワークオブジェクトには追加属性がある場合があります。ネットワークオブジェクトタイプのネットワークオブジェクトリストでは、すべての属性と属性値を表示できます。次の機能を使用してリストを開くこともできます。
- ► ネットワークオブジェクトサイドバーで、目的のネットワークオブジェクトタイプを右クリックします。次に、ショートカットメニューから、[Show List]-[リストの表示] を選択します (ネットワークオブジェクトサイドバーのショートカットメニュー)。
- ► ネットワークエディタで、目的のネットワークオブジェクトを選択します。次に、ショートカットメニューから、[Show In List]-[リスト内に表示] をクリックします (ネットワークエディタでネットワークオブジェクトを選択してリストに表示)。
- ► [Lists]-[リスト] メニューの目的のカテゴリ内のネットワークオブジェクトタイプをクリックします。
ネットワークオブジェクトタイプのネットワークオブジェクトリストでは、ネットワークオブジェクトの属性と属性値を編集できます (リストのセルの選択)、(リストの使用)。
このオブジェクトタイプのオブジェクトは他のオブジェクトとの関係を持つことがあります。 これが、属性リストが結合リストの一部として表示される(左側に)理由です 。[Lists]-[リスト] ツールバーの [Relations]-[関係] ボックスでは、目的の関係の属性が右側に表示された結合リストを表示したり、編集したりできます(以下の「関係としての依存型オブジェクトの表示と編集」を参照)および (結合リストの使用)。

|
注意: リストでは、 |

ネットワークエレメントの基本的な属性は、ウィンドウの上部と、特定のネットワークオブジェクトタイプのネットワークオブジェクトのリスト内に表示されます。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[Port no.]-[ポート番号] |
感知器の物理的な [PortNo]-[ポート番号](PortNo)。制御手順内の感知器を識別します。信号制御の複数の感知器が同じ番号で利用可能である場合は、制御デバイスの1つのエントリポートに並列で接続されているものとして挙動します(論理OR演算)。 |
|
[Name]-[名前] |
名称 |
|
[Length]-[長さ] |
感知器の感知範囲の長さ。たとえば、0.000といった値も可能であり、これはトロリー線の接点や歩行者センサーのモデリングに有効です。これらは、ネットワーク内で細い横線で表示されます。 |
|
SC |
感知器を割り当てられる信号コントローラ。[Type]-[タイプ] ボックスで、[PT Calling Pt]-[PT呼び出しポイント] が選択されている場合、[SC] ボックスは無効となります。公共交通呼び出しポイントは、特定の信号コントローラには属しません。 |
|
[Type]-[タイプ] |
Type]-[タイプ]:感知器タイプを選択します (公共交通路線のモデリング):
|
[Location]-[位置] タブ
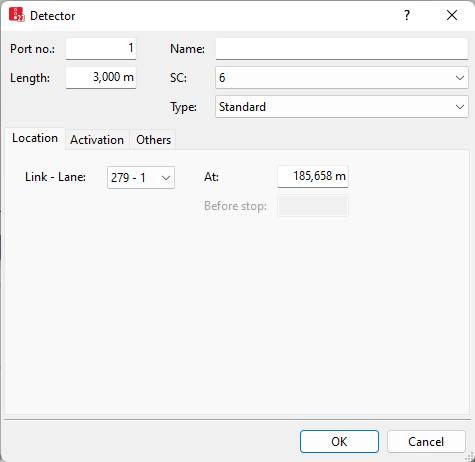
タブ内のリストには、特に次の属性が示されます。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
| [Link]-[リンク] | 感知器が配置されるリンク |
| [Lane]-[車線] | Ln:感知器が設置される車線の番号 |
| [At]-[位置] | [Position]-[位置](Pos):リンクまたはコネクターの開始地点からの距離 |
| [Before stop]-[停止前] | [Distance in front of stop line]-[停止線前の距離] (DistStopLine): 信号機がある場合、感知器の前方の端からその路線上の信号コントローラの次の信号機までの距離 |
車両の [Activation]-[アクティベーション] タブ
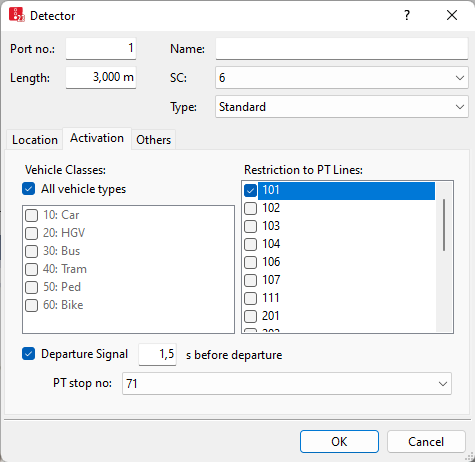
タブ内のリストには、特に次の属性が示されます。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
| [Vehicle Classes]-[車両クラス] | VehClasses:感知器によって感知された車両クラス |
| [Restriction to PT Lines:]-[公共交通路線に対する制約:] |
[PTLines]-[公共交通路線]:感知器が関連する、1つあるいは複数の公共交通路線。これらの公共交通路線の車両は、その車両クラスが選択されている場合にのみ検出されます。 |
|
[Departure Signal]-[出発信号] |
このように、ドア閉鎖のタイミングは感知器経由で決定できます。 |
 このオプションが選択された場合、感知器は、次の条件の下、公共交通車両のドア閉鎖のインパルスをトリガーします。
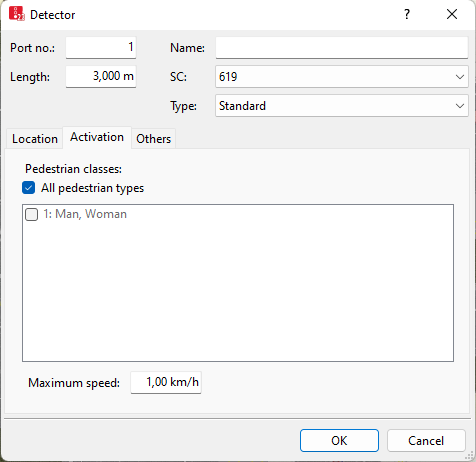
このオプションが選択された場合、感知器は、次の条件の下、公共交通車両のドア閉鎖のインパルスをトリガーします。歩行者の [Activation]-[アクティベーション] タブ
属性[Is pedestrian area]-[歩行者エリア] を持つリンクに定義された感知器は、横断歩道のボタンを押す歩行者をモデル化するために使用されます。ここでは歩行者クラスが表示されます。
1. 必要な変更を加えます。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
| [Pedestrian Classes]-[歩行者クラス] | 感知器によって感知された歩行者クラス。歩行者は、歩行者タイプが選択された歩行者クラスに属する場合にのみ、感知器によって認識されます。 |
| [Maximum speed]-[最大速度] |
歩行者がこの速度を下回ると、登録が転送されます。歩行者は青信号を要求します。その後、信号コントローラーが青信号に切り替わる前に歩行者がこの速度を超えた場合、登録解除が送信されます。 最高速度は、歩行者エリアとして使用されるリンクにのみ適用されます。デフォルト値の1.0 km/hは、例えば横断歩道の反対側から来る動きの遅い歩行者が再び呼び出しをトリガーするのを防ぎます。 |
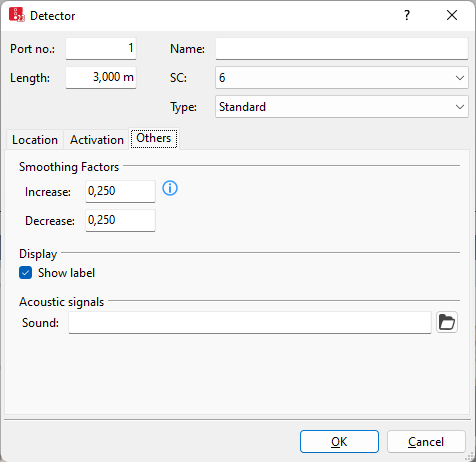
[Others]-[その他] タブ
2. 必要な変更を加えます。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[Smoothing Factors]-[平滑化係数] |
[SmthFactDecr, SmthFactIncr]-[平滑化係数減少、平滑化係数増加]:個々の管理手順で行われる、占有率の指数平滑化のための係数 (感知器の占有率の指数平滑化)。
|
| [Label]-[ラベル] |
|
| [Sound file]-[音声ファイル](音声) |
SoundFile:波形テーブルサウンドファイル*.wav。感知器によって車両が感知されるたびに再生されます。このファイルは、ネットワークファイル*.inpxと同じディレクトリ内に保存されます。音声カードまたは適切なMicrosoft Windowsのドライバーをインストールする必要があります。 |
 このオプションが選択されない場合は、すべての感知器のラベルが選択されているときでも、感知器のラベルは表示されません。
このオプションが選択されない場合は、すべての感知器のラベルが選択されているときでも、感知器のラベルは表示されません。3. [OK] で確定します。
このネットワークオブジェクトは、[Attributes]-[[属性] リストにある追加の属性を持ちます。たとえば、次のような属性がこれに該当します。
| [Element]-[エレメント] | [Description]-[説明] |
|---|---|
|
[Presence]-[存在] |
[Presence state]-[存在状態]:
次の条件が当てはまる場合、車両は感知器上に配置されます。
歩行者の中心が、感知器の長さと感知器が配置されている車線の幅を定義する長方形の中に配置されている場合、歩行者は感知器の上にあるとみなされます。 感知器の長さは、歩行者が1つのシミュレーション時間ステップ内で歩行できる距離より短くしないでください。さらに、この位置での歩行者の最大許容速度も考慮してください。感知器の寸法が短すぎる場合、つまり、ある時間ステップにおける歩行者の中心が感知器の前にあり、次の時間ステップでは感知器の後ろに来てしまう(感知器を通過してしまう)と、感知器は歩行者を検出することができません。[In front of]-[の前] と [behind]-[の後ろ]という言い方は、歩行者リンク上の歩行者の歩行の向きを視覚的にとらえた場合の表現です。歩行者にはリンク座標がないため、Vissimは歩行方向が感知器に向かっているのか、あるいは感知器から遠ざかっているのかを判断できません。 |
| [Detection]-{感知] |
[Detection state]-[検出状況]:
|
|
[Impulse]-[インパルス] |
[Impulse state]-[衝撃状態]:
|
| [Gap time]-[ギャップタイム] |
[Time]-[時間]:属性 [Presence]-[プレゼンス]([Presence state]-[プレゼンス状態])の値が [Active]-[アクティブ] となってからの経過時間 [s]。0 = [Presence]-[存在] 属性が [Active]-[アクティブ]。 |
| [Occupancy]-[占有率] |
Occ:感知器が占有されてから経過した時間 [s]。0 = 感知器が占有されていない状態([Presence]-[存在] 属性 = [Pasive]-[受動])。 タイプが [PT Calling Pt]-[公共交通呼び出しポイント] の感知器の場合は常に0。 |
| [Occupancy rate]-[占有率] |
OccupRate:前回のシミュレーション秒において感知器が占有されていた時間の割合。占有率は、各シミュレーション秒に基づいて指数的に平滑化されます。値の範囲は0~100% |
関係としての依存型オブジェクトの表示と編集
このネットワークオブジェクトタイプの属性と属性値が左側のリストに表示されます。これは、2つの結合リストで構成されています。
1. 左側のリストで、目的のエントリーをクリックします。
右側のリストには、左側のリストで選択されたネットワークオブジェクトに割り当てられたネットワークオブジェクトやベースデータの属性と属性値が示されます (結合リストの使用)。
- 車両クラス (車両クラスの使用)
- 歩行者クラス (歩行者クラスの使用)
- 公共交通路線 (公共交通路線のモデリング)
属性の詳細は、上記を参照してください。
2. リストツールバーの [Relations]-[関係] リストで、目的のエントリーをクリックします。
3. 目的のデータを入力します。
データが割り振られます。
