Моделировать конфликтные зоны для пешеходов
1. Убедитесь, что заданы следующие объекты сети:
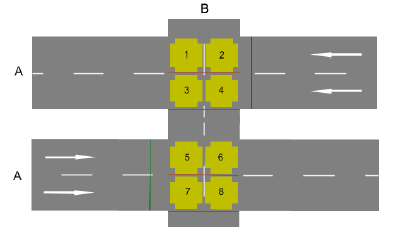
- Отрезки для пешеходов, на которых выбран атрибут Является пешеходной зоной (Определить пешеходные отрезки): B на рисунке.
- Отрезки для ТС, на которых деактивирован атрибут Является пешеходной зоной (Атрибуты отрезков): A, A на рисунке.
2. Нажмите на панели объектов сети кнопку Конфликтные зоны.
Vissim задает пассивные конфликтные зоны по обоим направлениям пешеходных отрезков. Пассивные конфликтные зоны по умолчанию отмечаются желтым.
Рисунок показывает пример моделирования:
3. Повторяйте следующие шаги до тех пор, пока не будет показываться нужное регулирование приоритета проезда.
4. Нажмите правой кнопкой мыши на нужную конфликтную зону.
5. Выберите в контекстном меню нужную запись:
- Установка статуса "2 предоставляет 1 приоритет проезда".
- Установка статуса "1 предоставляет 2 приоритет проезда".
- Установка статуса "Неопределенно".
Конфликтные зоны в области отрезка для пешеходов, который пересекает отрезок для транспортных средств, всегда имеют одинаковый приоритет проезда: пешеходы имеют приоритет или должны уступать на полосе движения. Пешеходы и транспортные средства решают, исходя из актуального приоритета движения с учетом актуальной скорости, а также нужной скорости, когда они могут пересечь конфликтную зону.
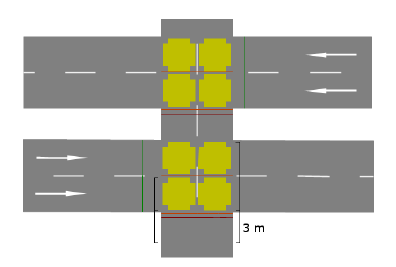
В этом случае приближающееся транспортное средство воспринимает пешехода не ранее чем за 3 м до его входа в конфликтную зону. Это расстояние зависит от того, должны ли пешеход или транспортное средство уступать дорогу, и от значений атрибутов Дополнительное расстояние между остановками или ([Промежуток сзади (стандарт)] конфликтных зон (Атрибуты конфликтных зон).
- Если пешеход должен уступить, то действует следующее правило: 3 м + дополнительное расстояние между остановками.
- Если транспортное средство должно уступить, то действует следующее правило: макс.(3 м, ([промежуток сзади (стандарт)] + 0,5 с) * 1,5 м/с).
|
|
Примечание: Если оба отрезка пересекаются под острым углом, то расстояние для пересечения дороги больше. В результате этого возрастает также потребность во времени пешеходов для пересечения отрезка. Так как геометрический анализ относительной позиции двух отрезков, связанных конфликтной зоной, не выполняется, то в этом случае может оказаться, что пешеход еще не покинет проезжую часть, когда следующее транспортное средство достигнет ее. |

Случай 1: Пешеходы должны ждать
Пешеходы, которые хотят пересечь отрезок для транспортных средств (А1) и входят в конфликтную зону на левой полосе (А1) вверху на рисунке, должны учитывать минимальную скорость, которая рассчитывается на стоп-линиях, где заканчиваются стрелки.
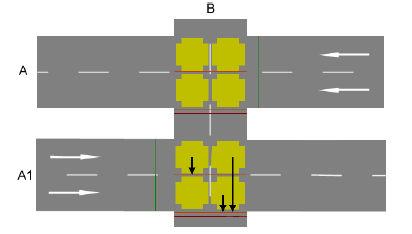
На стоп-линиях динамически рассчитываются минимальные скорости: пешеходы с минимальной или более высокой скоростью могут проходить стоп-линию, другие пешеходы должны ждать перед стоп-линией.
Пешеходы входят в конфликтную зону с отрезком для ТС только в том случае, если они (поэтапно) могут пересечь весь отрезок, ни разу не находясь на полосе движения, по которой в данный момент транспортное средство проезжает конфликтную зону. При этом исходят из нужной скорости пешехода и из актуальной скорости транспортного средства. Не рассматривается следующее.
- Транспортные средства, которые еще не находятся в сети.
- Транспортные средства, которые находятся на расстоянии более 75 м от конфликтной зоны, умноженные на количество полос движения отрезка. Это условие больше не может выполняться при въезде в конфликтную зону, если, например, транспортное средство ускоряется или на относительно небольшом расстоянии в сеть въезжает новое ТС. В этом случае пешеход ждет перед первой полосой отрезка для транспортных средств, которую он предположительно не сможет полностью пересечь до появления транспортного средства.
Случай 2: Транспортные средства должны ждать
На пешеходном отрезке пешеходная зона шириной 3 м выше по направлению движения к конфликтной зоне до начала конфликтной зоны служит в качестве "детекторной зоны" для пешеходов, которые приближаются к конфликтной зоне (Моделировать детекторы для пешеходов). Пешеходы внутри конфликтной зоны учитываются всегда:
Если, предположительно, ни один пешеход не войдет в конфликтную зону, то конфликтное время между пешеходами или группами пешеходов передается приближающимся транспортным средствам. Благодаря чему они смогут прореагировать соответствующим образом.
Вышестоящая тема: