Редактирование параметров манеры езды "Автономная поездка"
Для имитации транспортных средств с автономным управлением, в частности транспортных средств, объединенных посредством электронной связи в автоколонну (формирование автоколонн), можно указать атрибуты для манеры езды, чьи значения отличаются от значений атрибутов, представляющих манеру езды человека.
Vissim учитывает поведение и свойства, характерные для автоколонн и транспортных средств в автоколонне (Свойства автоколонны и транспортных средств автоколонны).

|
Примечание: Имитация формирования автоколонн в программе Vissim подходит для оценки воздействия на сеть автоколонны как единого целого. Однако она не подходит для определения специфических данных о транспортных средствах в автоколонне, например для расчета эмиссий от транспортных средств. |
Примеры для имитации типичных транспортных ситуаций
- Транспортные средства формируют автоколонну на одной полосе определенного фрагмента автомагистрали и продолжают движение в автоколонне. Автоколонна снова расформировывается вниз по потоку от участка маршрута.
- Транспортное средство присоединяется к автоколонне и становится ее частью.
- Ведущее транспортное средство автоколонны приближается к ТС, и это ТС становится частью автоколонны.
- Транспортное средство покидает автоколонну, чтобы следовать по своему маршруту или пути, и использует для этого съезд с автомагистрали.
Использование результатов имитации
Анализ результатов имитации автоколонны может помочь, например, ответить на следующие вопросы.
- В какой степени автоколонна изменяет время простоя на съездах с автомагистрали?
- Какое влияние оказывает при этом количество транспортных средств в автоколонне?
- В какой степени автоколонна изменяет пропускную способность на фрагменте автомагистрали?

|
Рекомендация: Примеры транспортных средств с автономным управлением можно найти в папке ..\Examples Training\Autonomous Vehicles (AV). |
Пример видео:Автоколонна в имитации
Транспортные средства приближаются к впереди едущим ТС и формируют автоколонну. Vissim визуализирует это с помощью графического параметра Режим рисования > Применить цветовую схему > Индекс в автоколонне опции ТС в сети.
Выбор атрибутов для манеры езды "Автономная поездка"
1. Выберите в меню Базовые данные > Манера езды.
Откроется список Манера езды. Некоторые наборы параметров манеры езды можно определить предварительно.
По умолчанию можно редактировать список.
Можно изменять все параметры манеры езды в списке или во вкладках, выполняя следующие шаги.
|
|
Примечание: Можно показать и скрыть в списках столбцы со значениями атрибутов, используя символ |

2. Нажмите правой кнопкой мыши на желаемую запись.
3. Выберите в контекстном меню запись Редактировать.
Откроется окно Манера езды.
4. Выберите вкладку Автономная поездка.
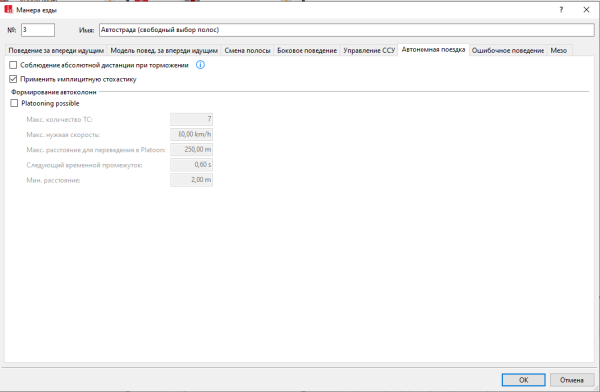
5. Введите желаемые данные.
| Элемент | Описание |
|---|---|
|
Соблюдение абсолютной дистанции при торможении |
СоблАбсДистБезоп: транспортное средство учитывает в качестве тормозного пути расстояние, необходимое для остановки с максимальным замедлением при торможении, не ведущее к столкновению, если впереди идущее транспортное средство остановится сразу без тормозного пути. Абсолютная дистанция при торможении действует на транспортные средства в следующих случаях:
Абсолютная дистанция при торможении не учитывается в параметре Правила приоритета. |
|
Применить имплицитную стохастику |
ПримИмплицСтох:
|
|
Раздел Формирование автоколонн |
|
|
Формирование автоколонн возможно. |
ФормАвтоколВозм: активирует формирование автоколонн, транспортные средства могут ехать в автоколонне. |
|
Макс. количество ТС |
Формирование автоколонны — макс. количество ТС (ФормАвтоколМаксКолвоТС): максимальное количество транспортных средств, которым разрешено ехать в автоколонне. К ним также относятся транспортные средства, которые хотят выехать из автоколонны. Значение по умолчанию 7. |
|
Макс. нужная скорость |
Максимальная нужная скорость автоколонны (МаксЖелСкАвтокол): максимальная скорость, с которой едут все транспортные средства в автоколонне, значение по умолчанию 80,00 км/ч. При движении за пределами автоколонны ведущее и позади идущее транспортные средства используют максимальную нужную скорость в автоколонне, даже если она отличается от нужной скорости, заданной по умолчанию для каждого транспортного средства. Максимальная нужная скорость в автоколонне в зоне малоскоростного движения не превышает скорости, применяемой в этой зоне. |
|
Макс. расстояние для формирования автоколонны |
Максимальное расстояние для формирования автоколонны (МаксРастФормирАвтокол): максимальное расстояние [м], до которого транспортное средство пытается присоединиться к автоколонне, чтобы стать позади идущим ТС этой автоколонны. Значение по умолчанию 250,0 м. |
|
Следующий временной промежуток |
Формирование автоколонн — следующий временной промежуток (ФормАвтоколСледВрПр): следующий временной промежуток между ТС и передним ТС в пределах автоколонны (Желаемая скорость и дистанция безопасности в автоколонне). Значение по умолчанию 0,60 с. |
|
Минимальное расстояние |
Формирование автоколонн —- минимальное расстояние (ФормАвтоколМинРаст): минимальное расстояние [м] транспортного средства до переднего ТС в пределах автоколонны (Желаемая скорость и дистанция безопасности в автоколонне). Значение по умолчанию 2,00 м. |
 если эта опция выбрана, то
если эта опция выбрана, то  Если эта опция не выбрана,
Если эта опция не выбрана, Для транспортных средств в автоколонне можно отобразить вид движения, состояние интеракции и позицию в автоколонне (индекс в автоколонне) на основании имитации в списке ТС в сети (Отображение ТС в сети в списке).