Attributes of conflict areas
The attributes of a conflict area influence the driving behavior of any vehicle approaching the conflict area. This is why a vehicle may change its intention, and thus its driving behavior, in a particular traffic situation. The situation arising thereof may differ from the attribute values defined. This is particularly true for any resulting gaps in front of and behind two vehicles.
In the network objects list of the network object type Conflict Areas, you can edit all attributes and attribute values of conflict areas (Opening lists), (Selecting cells in lists).

|
Note: In lists, you can use the |

1. Make the desired changes:
| Element | Description |
|---|---|
|
No |
Unique number |
|
Link1, Link2 |
Link 1, Link 2: Number and name of link with the conflict area |
|
VisibLink1, VisibLink2 |
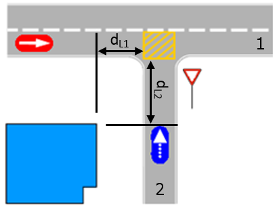
Visibility link 1, Visibility link 2: Maximum distance at which an approaching vehicle can "see" the vehicles on the other link. As long as a vehicle is on a non-priority link still far away from the conflict area, it plans to stop as close as possible to it. Avoid values < 1 m to keep the vehicle moving. In the Figure, the blue vehicle at the bottom on link 2 has reached the point from where it can fully "see" past the blue building on link 1 where the red vehicle is (on the left). This means the visibility for link 2 = dL2.
|
|
Status |
Identification of right of way by colors:
|
|
FrontGapDef FrontGap |
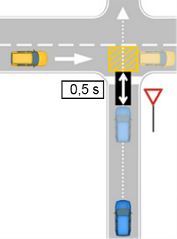
Front gap (default):
The figure below shows the current situation (the non-transparent vehicles - upstream) and the future situation (the semi-transparent vehicles - upstream). In the future situation, the vehicle in the major flow has just left the conflict area. Up until this time, the Front gap is considered the time required by the vehicle in the minor flow to reach the empty conflict area (in this case: 0.5s)
|
|
RearGapDef RearGap |
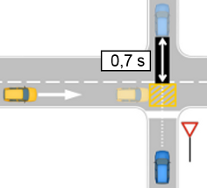
Rear gap (default): Only for type Crossing:
The figure shows the current situation (vehicles darker in color - upstream) and the future situation (as light, semi-transparent vehicles - upstream), once the vehicle in the major flow has reached the conflict area. The rear gap is evaluated as the time that has elapsed since the vehicle in the minor flow has left the conflict area (in this case: 0.7s).
|
|
MinGapBlockDef MinGapBlock |
Minimum gap blocking (default): Only applies if the attribute Avoid blocking the major flow is not selected and thus a yielding vehicle may enter the conflict area, blocking the major flow:
|
|
MesoCriticGap |
Meso critical gap: Edit this value in the Meso turn conflicts list or in the coupled list Nodes - Meso turn conflicts (Attributes of meso turn conflicts), (Attributes of nodes). |
|
SafDistFactDef |
Safety distance factor: only for the type Merge: This factor is multiplied with the normal desired safety distance of a vehicle in the major flow in order to determine the minimum distance a vehicle of the yielding flow must keep when it is completely in the conflict area of type Merge. Into the Gaps list on the right, you can enter the safety distance factor per vehicle class. The figure below shows identical situations, but with different factors: top = 1.0, bottom = 0.5. This is why the blue vehicle (bottom) can still enter the conflict area, while the red vehicle (top) has to stop. In the figure, the relevant part of the safety distance is highlighted in yellow:
|
|
AddStopDist |
Additional stop distance: only relevant for vehicles or pedestrians required to wait: Distance in meters where pedestrians or vehicles must wait upstream of the conflict area if they have to yield the right of way. As a result, vehicles or pedestrians are required to stop further away from the conflict area and thus also have to travel a longer distance to pass this area. Default value 0 m: The stop line position is immediately upstream of the start point of the conflict area in the direction of travel. The additional stop distance describes the upstream position on the link at which the pedestrians or vehicles have to wait if they have to yield the right of way. You can position the stop line upstream from the regular stop line of the conflict area. |
|
ObsAdjLns |
Observe adjacent lanes: This option reduces the simulation speed. |
|
AnticipRout |
Anticipate routes: Percentage of vehicles required to yield that account for the routes of vehicles with the right of way. These are approaching with the major flow and will turn further upstream. They will thus not reach the conflict area. For example, you can use it to determine the percentage of vehicles that enter a roundabout in reality because they trust the priority vehicle to exit the roundabout before it reaches the conflict area, based on the set turn signal of the priority vehicle. Value range 0 to 100 %, default value 0 % |
|
AvoidBlockMinor |
Avoid blocking the minor flow: If a vehicle with the right of way belongs to the percentage rate selected, it will check the space available downstream of the conflict area and does not drive into the conflict area under the following conditions:
|
|
AvoidBlockMajor |
Avoid blocking the major flow
Example: You are modeling a long conflict area between a vehicle route and a very wide pedestrian route with many narrow lanes and with a priority for pedestrians. Deactivate the option to let a vehicle successively drive into and traverse the lane conflicts without having to wait for a time when it can drive through the entire conflict area, and possibly other conflict areas lying close behind it, in one go. |

 If this option is selected, at merging conflicts, incoming vehicles of the minor flow that are required to yield will account for the vehicles in the major flow that want to change to the conflicting lane. Vehicles that have already started changing lanes and want to change to the lane with the conflict are taken into account. Vehicles that have not yet started changing lanes are not taken into account.
If this option is selected, at merging conflicts, incoming vehicles of the minor flow that are required to yield will account for the vehicles in the major flow that want to change to the conflicting lane. Vehicles that have already started changing lanes and want to change to the lane with the conflict are taken into account. Vehicles that have not yet started changing lanes are not taken into account. If this option is not selected, a yielding vehicle can enter and stop within the conflict area, even if it cannot drive into the following lane conflict, as it is blocked by a vehicle that has the right of way. In this case, the yielding vehicle might block the major flow. For the yielding vehicle, the attribute
If this option is not selected, a yielding vehicle can enter and stop within the conflict area, even if it cannot drive into the following lane conflict, as it is blocked by a vehicle that has the right of way. In this case, the yielding vehicle might block the major flow. For the yielding vehicle, the attribute The network object has additional attributes that you can show in the Attributes list. Among them are the following for example:
| Element | Description |
|---|---|
| Conflict type determined automatically |
ConflTypDetmAuto:
|
| Conflict type (manual) |
ConflTypMan: Select conflict type (Using conflict areas):
A conflict type is valid for all lanes of a conflict area. You cannot select different conflict types within a conflict area. |
Showing and editing dependent objects as relation
The attribute and attribute values of this network object type are shown in the list on the left, which consists of two coupled lists.
1. In the list on the left, click the desired entry.
The list on the right contains attributes and attribute values of network objects, and/or base data allocated to the network object selected in the list on the left (Using coupled lists):
- Defining time gaps [s]
The attributes are described further above.
