Some endpoints enable you to retrieve data based on some specific locations:
-
strt: Street location referring to the most detailed transportation graph, encoded as a PTV Optima – TDE element.
-
openlr: Street location referring to the most detailed transportation graph, encoded as an OpenLR element.
-
link: Location of the links belonging to the graph, used to perform a forecast.
-
ploc: Location of another potentially available graph mapped on the PTV Optima – TDE street graph. For example, it can be used for referencing TMC networks.
-
cloc: Count location reference related to sensors that are able to provide data over the entire section of a street.
-
detector: Location reference related to sensors that are able to provide data over a single lane of a street.
-
tpeg: Supports both linear and point locations.
The strt location represents the arc of the transportation graph modeled in TDE.
The corresponding graph is the most detailed one available on Optima and can thus also be used for routing.
It is the graph used to handle external inputs (measurements, events, forecasts).
All data input from outside Optima must be attached to its streets, otherwise Optima is not able to consider this input.
For a full description of the Optima data model: → DB Optima layout.
For details on OpenLR, see → OpenLR.
Optima can get INRIX traffic states, which are provided on locations called XD Segment (XDS). An XDS is an OpenLR line location reference consisting of two or more reference points.
All INRIX locations are imported via the INRIX feed before requesting a traffic state. The INRIX locations are automatically mapped on the strt graph of the Optima data model.
However, a manual check of this procedure is needed to fix mistakes and missing associations. This activity is a professional service not included in any Optima license → INRIX Interface.
Each time that INRIX modifies XDS locations, you will need to update your Optima system.
Traffic states from INRIX are fetched using the INRIX service GetSegmentSpeedInBox.
Optima takes into account all parameters supported by the INRIX specification, that are subject to the following constraints:
| INRIX service parameter | Optima value |
|---|---|
| RoadSegmentType | XDS |
| Units | 1 |
The link location represents the arcs of the graph used to perform forecasts. The link graph is not necessarily the same as the strt graph. The link graph is usually a sub-graph of the street graph and can be simplified.
The link graph must be a one connected selection of links.
- There is no interest in forecasting on all the streets of the full graph. This is mainly because streets that have a functional road class (FRC) level of minor importance are often meaningless for the forecast. An example is: local roads.
- The performance of the Optima forecast engine is linearly proportional to the number of links for which the forecast is done. Decreasing the number of links results in a faster simulation. This makes it possible to obtain forecast results in real-time and for large transportation networks - not only on a city level, but also on a regional level or nationwide.
If only part of the full transportation graph is selected, the relationship between a link arc and a strt arc is simply a one-to-one association. However, if a simplification is made, the relationship is a relation of one link arc to many strt arcs. Actually the simplification consists in fusing several strt arcs that have similar attributes. Again, this is mainly done for performance reasons because in this way the total number of links of the graph for which the forecast is done is smaller.
Thanks to the one-to-one or one-to-many mapping among link graph and strt graph elements, any kind of real data that comes from the field and is referred to the strt graph is also referred to the simulation graph. This enables the forecast engine to take care of all the data that enters the system.
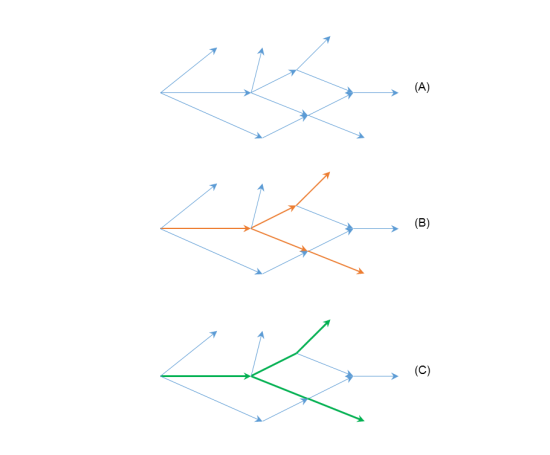
Example
In the next image, graph A shows a street graph. Graph B (red) shows a selection of graph A, creating links with a one-to-one relation to the streets. Graph C (green) is the simplified version of the link graph B, therefore it has a one-to-many relation to the street graph A.
A ploc location (predefined location) is a linear location that represents another graph with respect to the strt graph. The ploc location is essentially a referencing table between the other graph and the strt graph.
The ploc location can be used, for example, to map the TMC network to the Optima street graph in order to take into account traffic alerts sent via the ALERT-C protocol on the TMC network.
The idea behind the ploc location is the same as behind the openlr location: being able to have information on a given graph and being able to refer this information to another graph.
Given that an arc of a directed graph can be identified by its ID and by the ID of its From node, the easiest way to associate the two graphs is to associate the IDs of the two graphs and the relative position of their From nodes and their To nodes.
Example
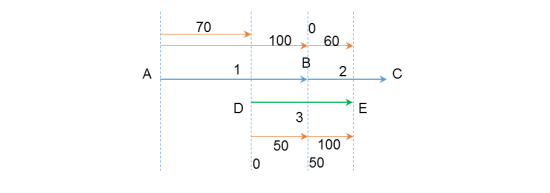
The following table shows an example of how strt arcs can be mapped to ploc arcs. Note that the relative positions listed in the table represent the percentage of coverage of one arc with respect to the other arc. Both are related to the From node of each corresponding arc.
| strt | ploc | ||||||
|---|---|---|---|---|---|---|---|
| ID | From node ID | From node relative position [%] | To node relative position [%] | ID | From node ID | From node relative position [%] | To node relative position [%] |
| 1 | A | 70 | 100 | 3 | D | 0 | 50 |
| 2 | B | 0 | 60 | 3 | D | 50 | 100 |
The next image shows the example mapping graphically. The strt arcs are blue, the ploc arc is green.
The term cloc is a short form for count location. A cloc represents a physical sensor that is able to collect data on the entire section of the road.
The sensor can collect one or several of the following data:
- flows
- densities
- speeds
In the Optima data model, the cloc location is a point location type. It is associated to a strt graph element.
A detector location represents a physical device that is able to collect any data on a single lane.
In the Optima data model, the detector location is a point location type. It is associated either to a strt graph element via a cloc, or it is assigned to a node of the strt graph via a junction element.
It supports the import of TPEG linear and point locations.
You can either specify an element <groupOfLocations> of type:
- Linear: containing the element <tpegLinearLocation>
- Point: containing an element <tpegPointLocation> of the type <TpegSimplePoint>
Optima provides several endpoints to manage different sets of locations, as shown in the table:
| Endpoint | strt | openlr | link | ploc | cloc | detector | tpeg | area |
|---|---|---|---|---|---|---|---|---|
|
https://<OPTIMA_HOST_IP_ADDRESS>:<PORT_NUMBER>/datex-interface/orca2/trafficstate |
YES |
YES |
NO |
YES |
YES |
YES |
NO |
NO |
|
https://<OPTIMA_HOST_IP_ADDRESS>:<PORT_NUMBER>/datex-interface/orca2/rlin/{location} |
YES |
YES |
NO |
YES |
NO |
NO |
NO |
NO |
|
https://<OPTIMA_HOST_IP_ADDRESS>:<PORT_NUMBER>/datex-interface/orca2/trafficstate/{location}/ |
YES |
YES |
NO |
YES |
NO |
NO |
NO |
NO |
|
YES |
NO |
NO |
NO |
NO |
NO |
NO |
NO |
|
|
https://<OPTIMA_HOST_IP_ADDRESS>:<PORT_NUMBER>/optima-planning/results/strt |
YES |
NO |
NO |
NO |
NO |
NO |
NO |
NO |
|
YES |
YES |
NO |
NO |
NO |
NO |
YES |
YES |