|
Nota : Dans HCM 2000, ce type de régulation est décrit au chapitre 17, dans HCM 2010 au chapitre 19, dans HCM 6e édition au chapitre 20. La majeure partie du calcul correspond au HCM 2000. La gestion explicite des demi-tours a notamment été ajoutée. Le calcul de HCM 6e édition correspond au calcul de HCM 2010. Dans Visum, les nœuds régulés par signalisation statique sont représentés par les types de régulation signalisation statique (stop) et signalisation statique (cédez le passage). La description dans HCM se rapporte à des nœuds avec des panneaux stop. Le calcul est en substance identique, la seule différence intervient dans la détermination des temps d’attente dans l’Étape 8. Les nœuds de type de régulation signalisation lumineuse sont également calculés selon la méthode pour les nœuds régulés par signalisation statique si aucune ISL ne leur est assignée ou si l’ISL est désactivée. |
La méthode d’analyse pour les carrefours régulés par signalisation statique repose sur le concept de l’acceptation d’intervalles véhicule. L’idée fondamentale est de calculer des capacités potentielles pour toutes les relations et de leur soustraire une certaine capacité sur la base du rang des relations (priorité). Le diagramme prévisionnel pour ce calcul est représenté dans l’Illustration 70.
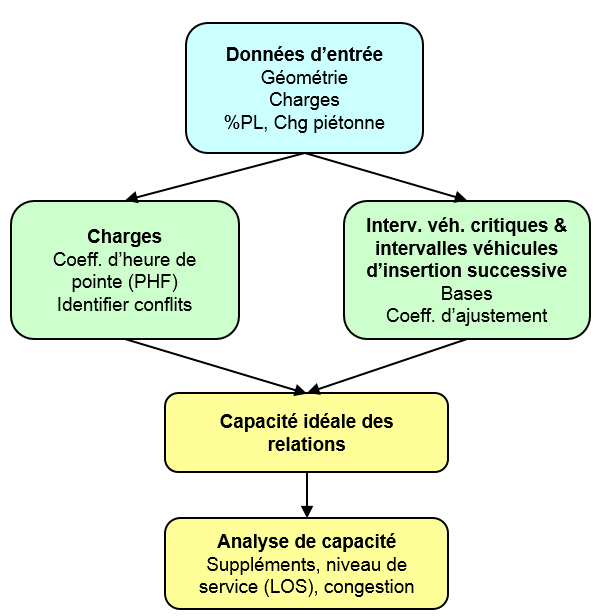
Illustration 70 : Déroulement du calcul pour les nœuds régulés par signalisation statique
Lorsque vous utilisez le modèle d’opération HCM pour les nœuds régulés par signalisation statique, les attributs Visum contenus dans la Table 100 s’appliquent. Vérifiez que des valeurs réalistes sont définies pour ces attributs avant le début de l’analyse.
|
Éléments de réseau |
Attribut |
Description / impact |
|
Tronçon |
Pente |
Utilisé dans l’Étape 3 |
|
Nœud |
PHFVolAdj ACI |
Coefficient d’ajustement de la charge initiale à la charge de pointe, les charges sont aussi bien divisées par les coefficients d’ajustement des nœuds que par ceux des mouvements au nœud. |
|
Géométrie |
tous |
Informations de géométrie pour les voies, les voies tournantes et les passages piétons |
|
Mouvement au nœud |
Part PL |
Proportion de poids lourds utilisée dans l’Étape 3 + Étape 4. Valeur forfaitaire qui s’applique au mouvement tournant |
|
Mouvement au nœud |
PHFVolAdj ACI |
Coefficient d’ajustement de la charge initiale à la charge de pointe, les charges sont aussi bien divisées par les coefficients d’ajustement des nœuds que par ceux des mouvements au nœud. |
|
Mouvement au nœud |
Interv véh critique configuré ACI |
Valeur de l’intervalle véhicule critique souhaité |
|
Mouvement au nœud |
Utiliser interv véh critique configuré ACI |
Vous pouvez écraser l’intervalle véhicule critique si vous le souhaitez, utilisé dans l’Étape 3. Quand l’option est activée, la valeur spécifiée sous Interv véh critique configuré ACI est utilisée. |
|
Mouvement au nœud |
Interv véh insertion successive configuré ACI |
Valeur de l’intervalle véhicule d’insertion successive souhaité |
|
Mouvement au nœud |
Utiliser inter véh insertion succ config ACI |
Vous pouvez écraser l’intervalle véhicule d’insertion successive si vous le souhaitez, utilisé dans l’Étape 4. Quand l’option est activée, la valeur spécifiée sous Interv véh insertion successive configuré ACI est utilisée. |
|
Mouvement au nœud |
Interv véh critique configuré phase 1 ACI |
L’attribut s’applique en conjonction avec les attributs Utiliser places dans îlot central ACI (branche) et Utiliser interv véh critique configuré ACI (mouvements au nœud) pour les flux subordonnés. La valeur saisie remplace la valeur par défaut pour l’intervalle véhicule critique dans la phase 1 de HCM pour la méthode dite « 2-stage gap acceptance ». |
|
Mouvement au nœud |
Interv véh critique configuré phase 2 ACI |
L’attribut s’applique en conjonction avec les attributs Utiliser places dans îlot central (branche) et Utiliser interv véh critique configuré (mouvements au nœud) pour les flux subordonnés. La valeur saisie remplace la valeur par défaut pour l’intervalle véhicule critique dans la phase 2 de HCM pour la méthode dite « 2-stage gap acceptance ». |
|
Branche |
Avec voie tournante à droite séparée |
Existence d’une voie tournante à droite distincte |
|
Branche |
Régulation de voie tournante à droite séparée |
L’attribut s’applique en conjonction avec l’attribut Avec voie tournante à droite séparée dans l’Étape 2 conformément aux règles définies dans HCM. |
|
Branche |
Calcul d’impact d’élargissement entrant ACI |
L’attribut s’applique en conjonction avec l’attribut Taille d’élargissement entrant ACI conformément aux formules du manuel HCM pour le calcul de capacité de voies mixtes. |
|
Branche |
Taille d’élargissement entrant ACI |
Taille d’élargissement entrant en nombre de véhicules, s’applique conformément aux formules de HCM pour le calcul de capacité de voies mixtes. |
|
Branche |
Utiliser places dans îlot central ACI |
L’attribut s’applique en conjonction avec l’attribut Nombre de places sur l’îlot central ACI pour la méthode dite « 2-stage gap acceptance » conformément aux formules du manuel HCM. |
|
Branche |
Nombre de places sur l’îlot central ACI |
L’attribut définit le nombre de places sur l’îlot central et s’applique pour la méthode dite « 2-stage gap acceptance » conformément aux formules de HCM. |
|
Voie |
Interv véh critique configuré ACI |
Valeur de l’intervalle véhicule critique souhaité |
|
Voie |
Utiliser interv véh critique configuré ACI |
Vous pouvez écraser l’intervalle véhicule critique si vous le souhaitez, utilisé dans l’Étape 3. La valeur analogue au mouvement au nœud n’est pas utilisée. Quand l’option est activée, la valeur spécifiée sous Interv véh critique configuré est utilisée. |
|
Voie |
Interv véh insertion successive configuré ACI |
Valeur de l’intervalle véhicule d’insertion successive souhaité |
|
Voie |
Utiliser inter véh insertion succ config ACI |
Vous pouvez écraser l’intervalle véhicule d’insertion successive si vous le souhaitez, utilisé dans l’Étape 4. La valeur analogue au mouvement au nœud n’est pas utilisée. Quand l’option est activée, la valeur spécifiée sous Interv véh insertion successive configuré est utilisée. |
Table 100 : Attributs d’entrée pour le calcul avec des nœuds régulés par signalisation statique
Les résultats sont enregistrés dans les mêmes attributs que pour les nœuds régulés par feux (Table 99). Les intervalles véhicule critiques et d’insertion successive calculés s’y ajoutent.
La méthode peut être appliquée pour toutes les relations (vers la gauche, tout droit, vers la droite). Chaque relation est classée conformément à la Table 101.
|
Rang |
|
|
1 |
Flux principal tout droit Flux principal vers la droite Flux secondaire passage piétons |
|
2 |
Flux principal vers la gauche Flux secondaire vers la droite Flux principal passage piétons Flux principal vers la gauche – priorité aux intervalles du flux antagoniste Flux secondaire vers la droite – priorité aux intervalles du trafic de la voie la plus à droite du flux principal Priorité aux piétons avant tous les autres |
|
3 |
Flux secondaire tout droit |
|
4 |
Flux secondaire vers la gauche |
|
Nota : Dans HCM 2010, les demi-tours sur le flux principal sont également pris en considération. Ils sont de rang 2. La configuration relative aux demi-tours dans les paramètres de procédure n’influe pas sur ces demi-tours si le calcul est effectué conformément à HCM 2010. |
Étape 1 : Calculer les volumes de trafic (charges) pour chaque relation
Les volumes d’heure de pointe de 15 minutes (calculés lors de l’ajustement du coefficient d’heure de pointe PHF) sont appliqués comme charges des relations ajustées.
Étape 2 : Flux conflictuels pour chaque relation
Outre le calcul des charges de chaque relation, il faut calculer les flux conflictuels pour chaque relation sur chaque voie d’accès.
|
Nota : Les relations de rang 1 ne comportent pas de flux conflictuels car elles présentent la priorité la plus élevée. Les relations de rang 1 sont fondamentalement exclues de l’analyse, à l’exception d’un calcul supplémentaire (Calculer l’occupation critique pour le carrefour entier). Dans HCM 2010, les voies d’élargissement pour tourne-à-gauche (tourne-à-droite dans la circulation à gauche) sont gérées séparément dans le flux principal. Dans HCM, seuls les nœuds à trois et à quatre branches sont décrits. Vous pouvez aussi calculer des nœuds avec plus de branches dans Visum. La gestion des flux conflictuels entre branches subordonnées non séparées par une branche du flux principal s’effectue selon la règle de la priorité à droite. Le calcul dans la circulation à gauche est symétrique par rapport à la circulation à droite. |
Un exemple (dans la circulation à droite) de flux conflictuel pour un tourne-à-gauche sur le flux principal est le suivant :
- Charge mouvement direct en sens inverse + charge tourne-à-droite en sens inverse (à moins que les tourne-à-droite en sens inverse sont séparés par un îlot triangulaire et respectent un panneau « cédez le passage » ou « stop ») + charge piétonne du flux secondaire croisé
La Table 102 montre les équations pour les flux conflictuels.
|
Relation |
Flux conflictuels |
|
Flux principal vers la gauche |
OT + OR* + ToP |
|
Flux secondaire vers la droite |
JT/N + 0.5JR* + FrP + ToP |
|
Flux secondaire tout droit |
2JL + JT + 0.5JR* + FrP + ToP + 2JLF + JTF + JRF* |
où
|
O |
Sens inverse |
|
T |
Mouvement direct |
|
R |
Tourne-à-droite |
|
L |
Tourne-à-gauche |
|
N |
Nombre de voies de mouvement direct |
|
J |
… principal |
|
I |
… secondaire |
|
F |
… éloigné (second flux rencontré pour mouvement direct/tourne-à-gauche du flux secondaire) |
|
ToP |
Voie d’accès avec passage piétons |
|
FrP |
Sortie avec passage piétons |
Il existe un certain nombre de cas dans lesquels le flux conflictuel est ajusté :
- Lorsque le flux principal vers la droite est séparé par un îlot triangulaire et que le flux respecte un panneau « cédez le passage » ou « stop », ce flux n’est pas considéré pour le calcul du flux conflictuel pour d’autres flux.
- Lorsque le flux principal dispose de plus d’une voie, seule la charge de la voie de droite du flux principal (= charge/nombre de voies de mouvement direct) est considérée comme flux conflictuel dans le cas de tourne-à-droite et de tourne-à-gauche en provenance du flux secondaire.
- Lorsque le flux principal comporte une voie de tourne-à-droite, les tourne-à-droite du flux principal ne sont pas comptabilisés dans le flux conflictuel.
- Pour des tourne-à-gauche en provenance du flux secondaire, la charge du tourne-à-droite en sens inverse n’est pas comptabilisée dans le flux conflictuel lorsque le tronçon de destination des deux mouvements tournants dispose de plusieurs voies.
|
Nota : Outre les demi-tours, HCM 2010 diffère de HCM 2000 sur des détails subtils. La détermination des flux conflictuels est décrite dans HCM 2010 aux pages 19-9 à 19-14. L’indication de voie prioritaire n’est généralement pas prise en considération dans HCM. Ici, la détermination des flux conflictuels est effectuée conformément à Brilon et Weinert, 2002. |
Étape 3 : Calculer l’intervalle véhicule critique pour chaque relation
L’intervalle véhicule critique est le temps qu’accepte un conducteur moyen pour s’insérer dans la circulation.
Exemple
Sarah requiert un écart de 4 secondes entre les véhicules pour tourner à gauche et s’insérer dans la circulation en toute sécurité.
L’équation pour le calcul de l’intervalle véhicule critique est la suivante :
tcx = tcb + (tcHVPHV) + (tcGG) - tcT - t3LT
où
|
tcx |
Intervalle véhicule critique pour la relation x |
|
tcb |
Valeur de base de l’intervalle véhicule critique (voir la Table 103) |
|
tcHVPHV |
Coefficient d’ajustement pour les poids lourds • pourcentage de poids lourds |
|
tcGG |
Coefficient d’ajustement pour la pente • pente (en tant que proportion) |
|
tcT |
Coefficient d’ajustement pour la traversée en deux étapes (actuellement mis à zéro, car on admet que toutes les traversées sont à une étape) |
|
t3LT |
Coefficient d’ajustement pour l’intervalle véhicule critique pour la géométrie |
Les autres coefficients d’ajustement sont les suivants :
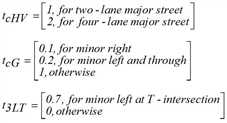
Les valeurs de base pour l’intervalle véhicule critique sont calculées comme le montre la Table 103.
Si les valeurs déterminées ne coïncident pas avec les valeurs observées, il est possible d’utiliser des valeurs configurées manuellement pour chaque mouvement au nœud.
Étape 4 : Calculer l’intervalle véhicule d’insertion successive pour chaque relation
L’intervalle véhicule d’insertion successive est le laps de temps supplémentaire que requiert un second véhicule pour utiliser l’intervalle.
Exemple
Admettons que Franck attend derrière Sarah au carrefour. S’il tourne directement derrière Sarah, il requiert un intervalle véhicule d’insertion successive de seulement 2 secondes au lieu des 4 secondes précédentes pour s’insérer dans la circulation. Cela signifie que si l’intervalle véhicule est au moins de 6 secondes, Sarah et Franck peuvent tous deux tourner en toute sécurité.
L’équation pour le calcul de l’intervalle véhicule d’insertion successive est la suivante :

où
|
tfx |
Intervalle véhicule d’insertion successive pour la relation x |
|
tfb |
Valeur de base de l’intervalle véhicule d’insertion successive (Table 104) |
|
tfHVPHV |
Coefficient d’ajustement pour l’intervalle véhicule d’insertion successive pour les poids lourds • pourcentage de poids lourds |
Les autres coefficients d’ajustement sont les suivants :

Les intervalles véhicule d’insertion successive sont calculés à l’aide de la Table 104.
|
Relation |
Valeur de base de l’intervalle véhicule d’insertion successive tfb |
|
Flux principal vers la gauche |
2,2 |
|
Flux secondaire vers la droite |
3,3 |
|
Flux secondaire tout droit |
4,0 |
|
Flux secondaire vers la gauche |
3,5 |
Si les valeurs déterminées ne coïncident pas avec les valeurs observées, il est possible d’utiliser des valeurs configurées manuellement pour chaque mouvement au nœud.
Étape 5 : Calculer la capacité potentielle (ou idéale) pour chaque relation
La capacité idéale est la capacité atteinte lorsque cette relation utilise tous les intervalles véhicule potentiels (c.-à-d. qu’aucune relation d’un rang supérieur n’utilise les intervalles). On suppose également que chaque relation dispose d’une voie propre. La capacité idéale est définie de la manière suivante :
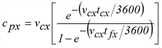
avec
|
cpx |
Capacité potentielle pour la relation x (véh/h) |
|
vcx |
Flux conflictuel pour la relation x (conflit/h) |
|
tcx |
Intervalle véhicule critique pour la relation x |
|
tfx |
Intervalle véhicule d’insertion successive pour la relation x |
Étape 6 : Calculer la capacité de relation en tenant compte des impacts conflictuels
Les relations au rang supérieur diminuent la capacité des relations au rang inférieur, car les mouvements tournants prioritaires peuvent utiliser les intervalles véhicules existants des relations au rang inférieur. Pour obtenir la capacité des relations, la capacité potentielle est donc ajustée à l’aide d’un coefficient d’ajustement. L’équation pour la capacité de relation est la suivante :

où
|
cmx |
Capacité de relation pour la relation x (véh/h) |
|
cpx |
Capacité potentielle pour la relation x (véh/h) |
 = probabilité que le mouvement tournant i d’un véhicule perturbant ne bloque pas la relation concernée
= probabilité que le mouvement tournant i d’un véhicule perturbant ne bloque pas la relation concernée
 = probabilité qu’un flux piéton perturbant j ne bloque pas la relation concernée
= probabilité qu’un flux piéton perturbant j ne bloque pas la relation concernée
|
vi |
Charge de la relation i |
|
vj |
Charge pour le flux piéton j (piétons/h) |
|
w |
Largeur de voie (ft), valeur par défaut 12 ft. |
|
SP |
Vitesse de marche (ft/s), valeur par défaut 4 ft/s |
Dans la mesure où le calcul dépend des capacités des relations prioritaires, le calcul est effectué dans l’ordre des rangs (des relations de rang 1 aux relations de rang 4). Les véhicules et flux piétons perturbants pour chaque relation concernée sont contenus dans la Table 105.
|
Relation |
Rang |
Relations perturbantes |
|
Flux principal tout droit |
1 |
aucune |
|
Flux principal vers la droite |
1 |
aucune |
|
Flux principal vers la gauche |
2 |
ToP |
|
Flux secondaire vers la droite |
2 |
FrP, ToP |
|
Flux secondaire tout droit |
3 |
JL, JLF, FrP, ToP |
|
Flux secondaire vers la gauche |
4 |
JL, JLF, OT, OR, FrP, ToP |
où
|
J |
… principal |
|
I |
… secondaire |
|
O |
Sens inverse |
|
T |
Mouvement direct |
|
R |
Tourne-à-droite |
|
L |
Tourne-à-gauche |
|
F |
… éloigné (second flux rencontré pour mouvement direct/tourne-à-gauche du flux secondaire) |
|
ToP |
Voie d’accès avec passage piétons |
|
FrP |
Sortie avec passage piétons |
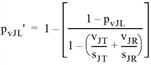
Étape 6a : Calcul de l’ajustement pour la perturbation du tourne-à-gauche d’un flux principal
Il faut également calculer un coefficient d’ajustement pour le tourne-à-gauche d’un flux principal lorsqu’il n’existe pas de voie propre. L’équation utilise un débit de saturation par défaut. Elle a la forme suivante :
où
|
pvJL‘ |
Probabilité modifiée pour la perturbation du tourne-à-gauche d’un flux principal |
|
pvJL |
Probabilité non modifiée pour la perturbation du tourne-à-gauche d’un flux principal |
|
vJT |
Charge du mouvement direct d’un flux principal |
|
vJR |
Charge du tourne-à-droite d’un flux principal (0 en cas de voie de tourne-à-droite propre) |
|
sJT |
Débit de saturation du mouvement direct d’un flux principal (valeur par défaut 1 700) |
|
sJR |
Débit de saturation du tourne-à-droite d’un flux principal (valeur par défaut 1 700) |
|
Nota : Dans HCM 2010, le cas d’une voie d’élargissement courte sur le flux principal est également décrit (HCM 2010, page 19-20). |
Étape 6a : Calculer les ajustements pour les tourne-à-gauche d’un flux secondaire
En outre, il existe un ajustement particulier pour les tourne-à-gauche d’un flux secondaire (Rang 4). L’équation figure ci-après. En principe, les tourne-à-gauche du flux principal et le mouvement direct du flux secondaire sont calculés d’avance puis ajustés. La valeur ajustée est utilisée en rapport avec les tourne-à-droite restants du flux secondaire et les probabilités pour les piétons.


où
|
pvJL |
Probabilité pour la perturbation du tourne-à-gauche proche d’un flux principal |
|
pvJLF |
Probabilité pour la perturbation du tourne-à-gauche éloigné d’un flux principal |
|
pvIT |
Probabilité pour la perturbation du mouvement direct d’un flux secondaire |
|
pvR4 |
Probabilité flux secondaire vers la gauche (Rang 4) |
|
pvIR |
Probabilité flux secondaire vers la droite (Rang 2) |
|
ppIP |
Probabilité flux secondaire piéton |
|
ppJP |
Probabilité flux principal piéton |
Étape 7 : Capacité de relation sur des voies mixtes
Jusqu’ici, les calculs admettent que chaque relation du flux secondaire dispose d’une voie propre. Lorsqu’il existe une voie mixte, une capacité combinée est calculée pour les relations qui se partagent une voie.

où
|
CSH |
Capacité de la voie mixte |
|
vi |
Charge des relations des routes secondaires i |
|
cm |
Capacité de relation des relations des routes secondaires i |
|
Nota : Veuillez noter que les ajustements en amont pour les signaux et la formation de pelotons sont actuellement encore exclus du calcul. Il en est de même pour l’ajustement de l’intervalle véhicule acceptable pour une traversée en deux étapes ainsi que pour des voies d’accès élargies. |
Étape 8 : Calculer le temps d’attente
Le calcul du temps d’attente de la régulation est défini de la manière suivante :

où
|
dx |
Temps d’attente moyen de la régulation par véhicule pour la relation x |
|
cmx |
Capacité de relation (voie mixte x, CSH) |
|
T |
Durée du laps de temps d’analyse (h) (valeur par défaut 0,25 pour 15 min.) |
|
vx |
Charge de relation (voie mixte x, VSH) |
Une formule semblable est utilisée pour le calcul du type de régulation signalisation statique (cédez le passage) :

Le temps d’attente de la régulation pour chaque relation est agrégé pour la voie d’accès avec une moyenne pondérée (par la charge) de toutes les relations / des voies mixtes dans la voie d’accès. Le temps d’attente moyen de la voie d’accès est ensuite agrégé pour le carrefour entier, également avec une moyenne pondérée. Les équations sont les mêmes que pour les carrefours régulés par feux.
Veuillez noter qu’aucun temps d’attente n’est appliqué pour les relations de rang 1. Si toutefois aucun élargissement n’est disponible exclusivement pour les tourne-à-gauche, il peut également exister des temps d’attente pour des relations de rang 1. Dans ce cas, il existe une équation de temps d’attente supplémentaire pour les relations de rang 1 lorsqu’il n’existe aucun élargissement pour les tourne-à-gauche sur les voies d’accès principales. L’équation est la suivante :
où
|
dR1 |
Temps d’attente pour les véhicules du rang 1 (s/véh) |
|
N |
Nombre de voies de mouvement direct du flux principal par sens |
|
pvJL |
Probabilité pour la perturbation du coefficient d’ajustement de tourne-à-gauche d’un flux principal [5] |
|
dJL |
Temps d’attente du tourne-à-gauche d’un flux principal (s/véh) |
|
vT |
Charge de mouvement direct de la voie mixte (en cas de voies multiples, uniquement la charge de la voie mixte) |
|
vR |
Charge du tourne-à-droite de la voie mixte (en cas de voies multiples, uniquement la charge de la voie mixte) |
Lors du calcul du temps d’attente dans la voie d’accès et/ou du carrefour, ce temps d’attente est remplacé par le temps d’attente nul des relations de rang 1.
Le niveau de service est défini en tant qu’assignation sur la base du temps d’attente au carrefour, comme le montre la Table 106.
|
Nota : Dans HCM 2010, un dépassement éventuel de la capacité est pris en considération pour la détermination du niveau de service. Dans ce cas, le niveau de service est toujours F (HCM 2010, page 19-2). |
La longueur de la congestion au carrefour est calculée de la manière suivante :
où
|
Q95x |
95e centile de la longueur de congestion pour la relation x (véh) |
|
cmx |
Capacité de relation (voie mixte x, CSH) |
|
T |
Durée du laps de temps d’analyse (h) (valeur par défaut 0,25 pour 15 min.) |
|
vx |
Charge de relation (voie mixte x, VSH) |